Pololu Blog »
Pololu Blog (Page 14)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New products: D36V28Fx Step-Down Voltage Regulators
 |
I am happy to announce the release of our newest regulators, the D36V28Fx family of step-down voltage regulators. These regulators support a wide input voltage range (up to 50 V!) and can deliver up to 4 A, making them well suited for use with power-hungry processors like the Raspberry Pi and projects involving servos or small motors.
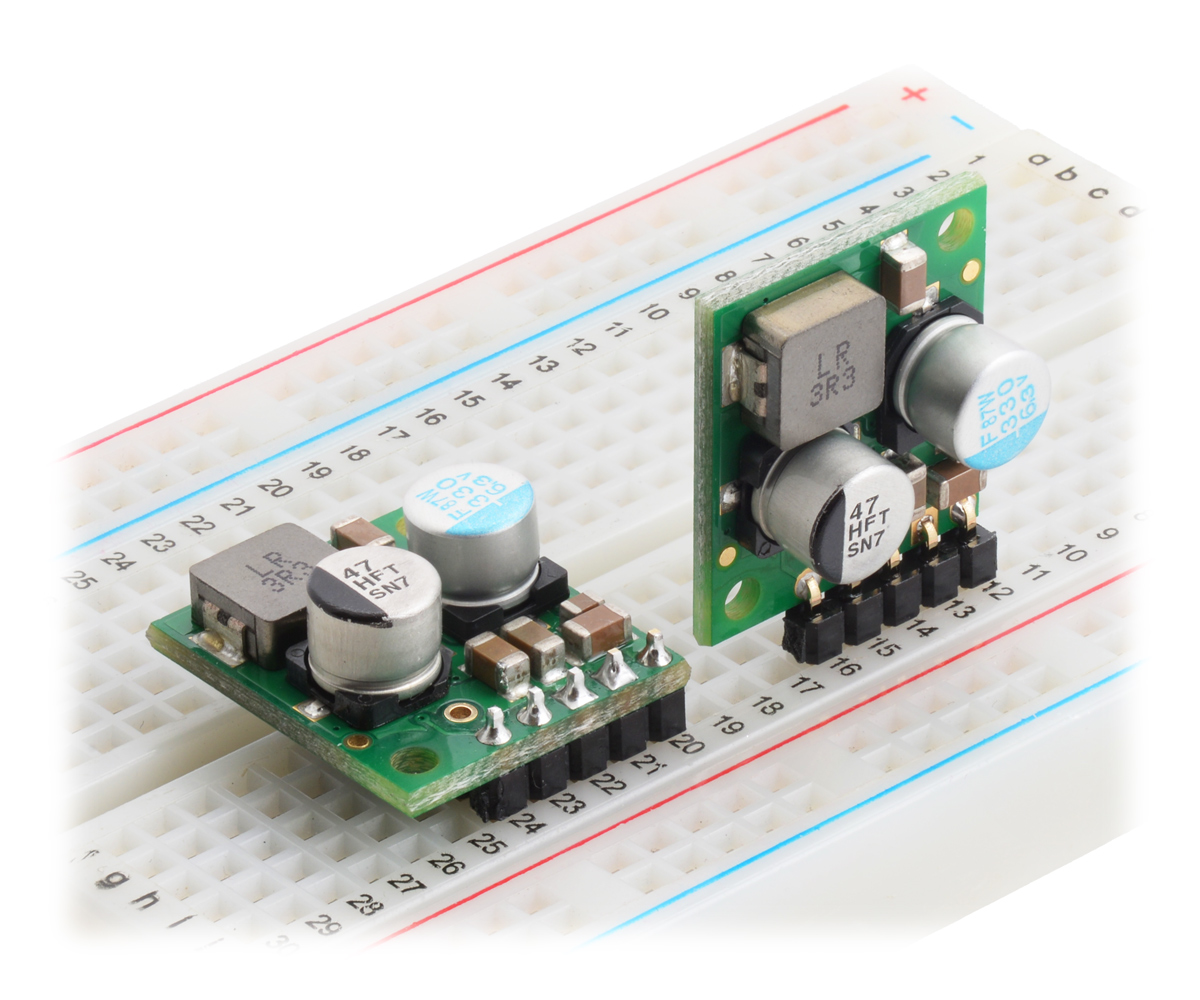 |
Step-Down Voltage Regulator D36V28Fx, assembled on breadboard. |
|---|
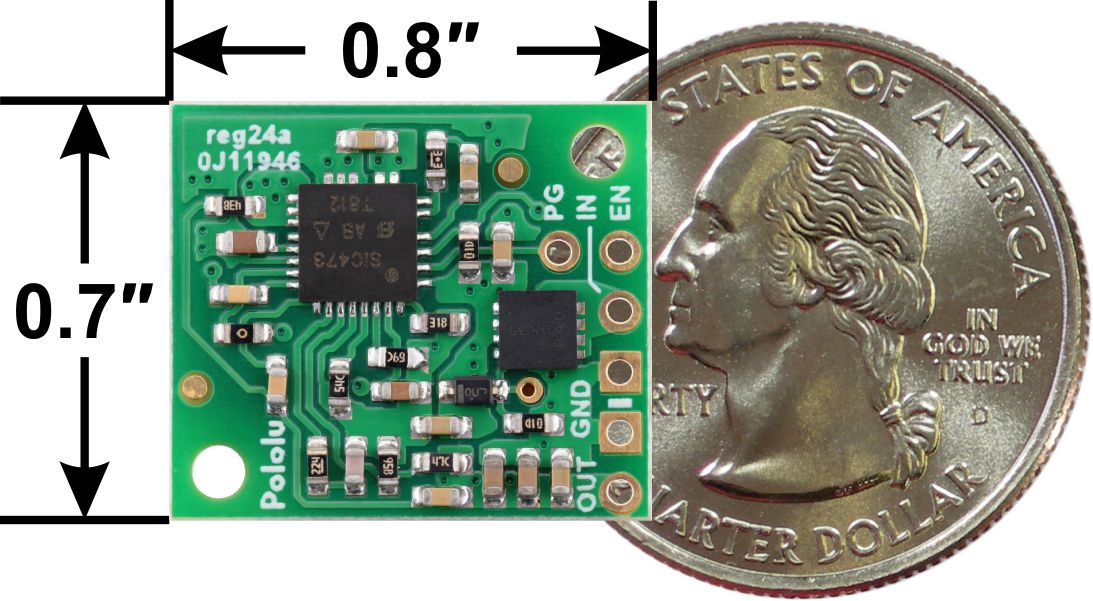 |
Step-Down Voltage Regulator D36V28Fx, bottom view with dimensions. |
|---|
The family consists of six fixed output voltage versions between 3.3 V and 12 V:
- D36V28F3: Fixed 3.3V output
- D36V28F5: Fixed 5V output
- D36V28F6: Fixed 6V output
- D36V28F7: Fixed 7.5V output
- D36V28F9: Fixed 9V output
- D36V28F12: Fixed 12V output
And since we make these ourselves here in Las Vegas, we can also quickly make versions with custom output voltages; please contact us us for more information.
Comparison to the D24V22Fx step-down regulator family
|
|


The D36V28Fx family now becomes our recommended alternative to the slightly smaller D24V22Fx if you need a little more power or operation above 36 V:
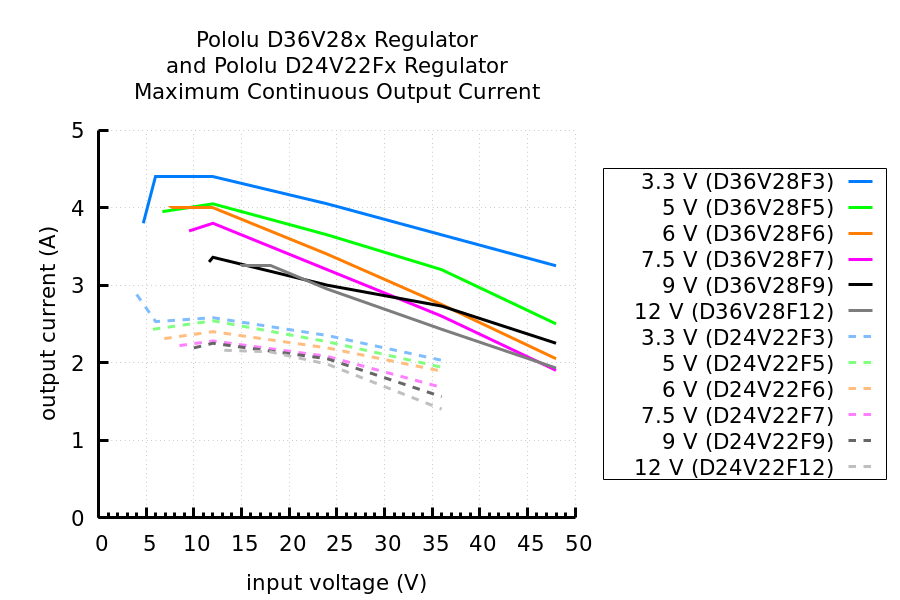 |
Comparison of the maximum continuous current of Step-Down Voltage Regulators D36V28Fx and D24V22Fx. |
|---|
The D24V22Fx still outperforms the D36V28Fx when it comes to dropout voltage and quiescent current:
 |
Comparison of the dropout voltage of Step-Down Voltage Regulators D36V28Fx and D24V22Fx. |
|---|
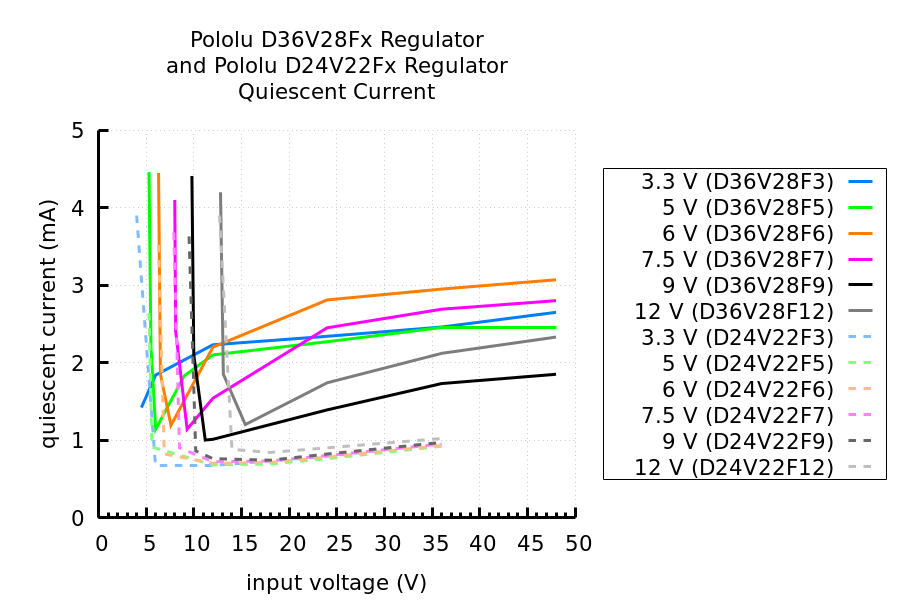 |
Comparison of the quiescent current of Step-Down Voltage Regulators D36V28Fx and D24V22Fx. |
|---|
Introductory special
As usual, we are offering an extra introductory special discount on these new regulators, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code D36V28XINTRO can get up to three units for just $7.77 each!
Related products






Pololu National Robotics Week Sale

Next week is National Robotics Week: a week centered on increasing awareness of the robotics industry and the impact that robotics will have on the future. To celebrate, we’re having a sale! All Pololu robot kits and their accessories are 25% off; this includes our 3pi, Zumo, Balboa, and Romi robots. Additionally, all active Pololu-brand items are 20% off, so you can stock up on motor controllers, regulators, sensors and much more! Whether you are a seasoned robot builder or just getting started in robotics, you are sure to find something in this sale for you. Check out the sale page for more information.
New products: ACHS-7121/7122/7123 current sensor carriers

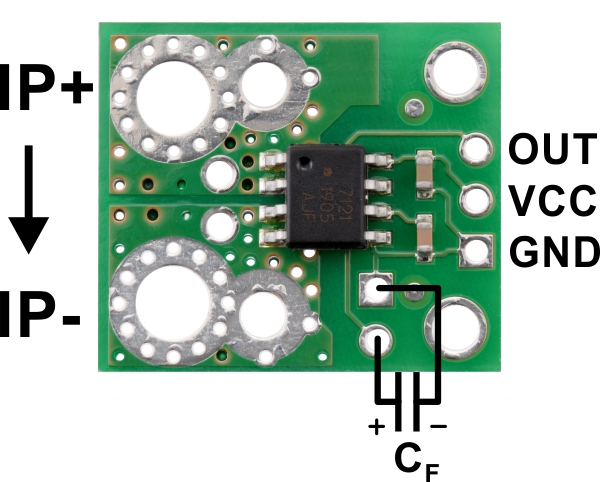 |
We are excited to offer new carriers for Hall effect-based linear current sensors from Broadcom. These easy-to-use bidirectional current sensors are available in three current range options:
- ACHS-7121 Current Sensor Carrier -10A to +10A
- ACHS-7122 Current Sensor Carrier -20A to +20A
- ACHS-7123 Current Sensor Carrier -30A to +30A
The ±10A and ±30A version have the same output sensitivity as our older ±5A and ±30A Allegro ACS714 Hall effect-based linear current sensor, respectively, so they should work as a drop-in replacement in many applications.
Introductory special
As usual, we are offering an extra introductory special discount on the ACHS-712x current sensor carriers, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code ACHSINTRO can get up to five units for just $3 each!
Related products



Kinetic art installation using 24 Maestros to control 576 servos
 |
This wall-mounted kinetic art installation by Alain Haerri redirects light from 576 independently actuated square panels. A flattened segment of an aluminum can, cut to the same square shape as the panel, decorates each actuator, and a small servo allows the decorated panel to pivot up or down. The servo’s positioning of the panel can alter how much light is reflected, effectively making that individual panel appear lighter or darker. Taken together, the array of panels produces an image with enough resolution and speed for delightful and mesmerizing visuals.
At the heart of the operation is an Arduino Mega, which, with the help of our Maestro Arduino library, communicates with 24 Mini Maestros (with 24 channels each) to orchestrate the movement of servos. The Mini Maestros are wired together and connected to a single software serial port on the Mega, which controls all the Maestros using the Pololu protocol at 200 kilobaud. Additionally, the installation has a built-in camera, which allows it to do things like mirror the movement of people standing in front of it, as this video shows:
You can find a write-up of Alain’s project on the Arduino Project Hub, where he also shares his code, a complete parts list, and a couple more videos of the table in motion.


New product: Case with Fan for RoboClaw 2x15, 2x30, and 2x45
|
|


With this new RoboClaw case, our selection of RoboClaw products just got even cooler – literally! In addition to protecting the motor controller, this case also has an integrated fan, which will allow an enclosed RoboClaw to deliver higher continuous currents and sustain peak currents longer. The case works with 2x15A, 2x30A, 2x45A, and ST 2x45A RoboClaw motor controllers and features cutouts for accessing the motor outputs and the various control input header pins.
Related products



Updated product: A-Star 32U4 Prime LV
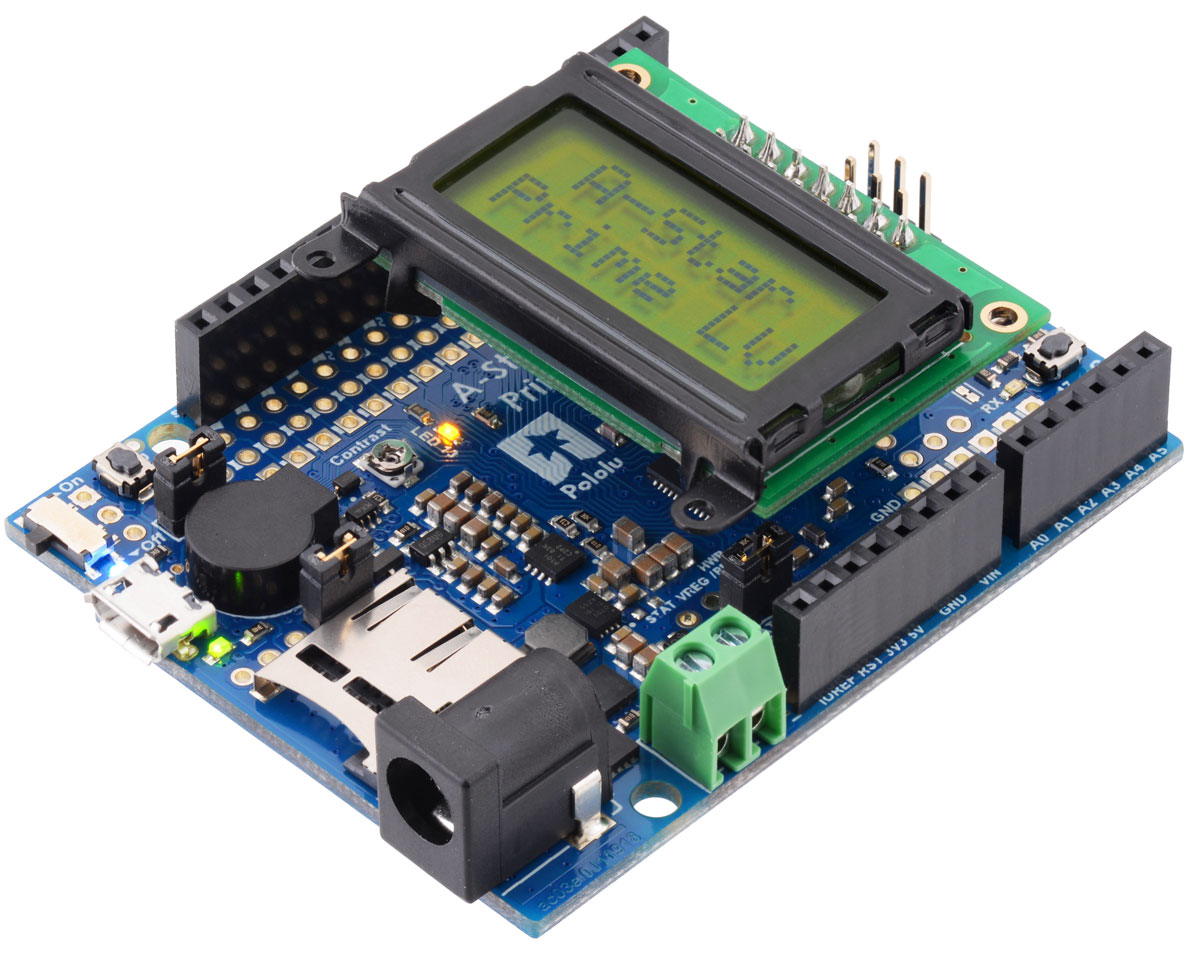
We have updated our A-Star 32U4 Prime LV with a new regulator that offers a wider operating voltage range and increased current capabilities. For those of you not already familiar with our A-Star 32U4 Primes, they are a series of ATmega32U4-based, USB-programmable controllers with integrated regulators that offer operating voltage ranges not available on typical Arduino-compatible products; this new “LV” variant features an improved buck-boost converter that enables efficient operation from 2 V to 16 V power supplies (Note: it requires an input voltage of at least 3 V to start, but it can operate down to 2 V after startup). The A-Star Primes are arranged in the common Arduino form factor exemplified by the Uno R3 and the Leonardo, so they are compatible with many Arduino shields, including all of the Arduino shields we carry.
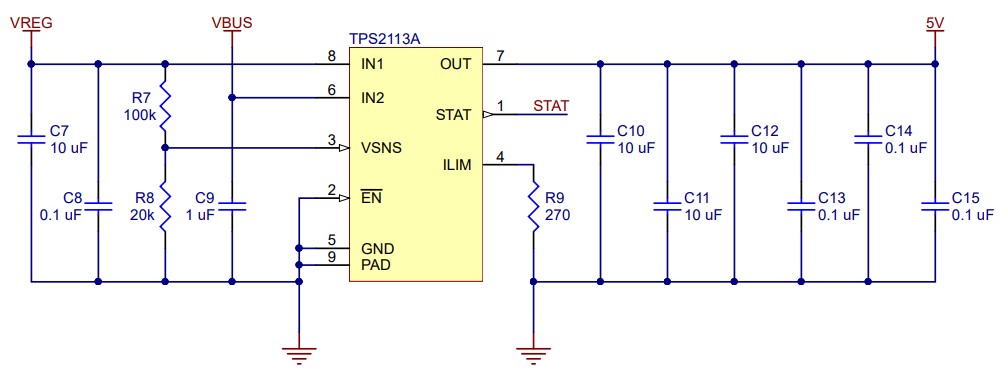
In addition to the increased input voltage range for the new A-Star Prime LV, the new regulator also provides more current. The graph below shows the current available on the new LV (ac03e) in blue compared to the old LV (ac03b) in purple. It is important to note that to use the full current available on the new A-Star Prime LV, you must connect to the VREG pin on the board and not the 5V ouput pin. The 5V output pin is limited to about 1.9 A because of the TPS2113A power multiplexer that makes up the board’s power selection circuit (a feature that sets the A-Star Primes apart from competing products). The power multiplexer decides whether the board’s 5 V supply is sourced from USB or an external supply via the regulator, allowing both sources to be connected at the same time and enabling the A-Star to safely and seamlessly transition between them. The multiplexer is configured to select external power unless the regulator output falls below about 4.5 V. If this happens, it will select the higher of the two sources, which will typically be the USB 5 V bus voltage if the A-Star is connected to USB. More information about the multiplexer can be found in this section of the A-Star 32U4 user’s guide under the Power heading.
|
|

The original version of the A-Star Prime LV, which operates from 2.7 V to 11.8 V, is now on clearance for 40% off! If you don’t need the increased output current and wider voltage range the new board offers, the previous version is still a great programmable controller to consider. Both the new and original A-Star Prime LVs come in multiple configurations. The complete selection of both versions can be found in the related products list below.
Related products










Video of Caesar, the first-place rover of the 2019 Indian Rover Challenge
The first-place winner of the 2019 Indian Rover Challenge, Team Anveshak from IIT Madras, sent us a link that shows their rover in action! The video is their submission to the 2019 University Rover Challenge (URC) System Acceptance Review (SAR), which is a major qualification round for participating in the URC finals. Good luck with SAR qualifications, Team Anveshak!
We first blogged about Team Anveshak’s rover back in January. For more information on the rover and the competition, including pictures, check out that post!
New product: 24V Step-Up/Step-Down Voltage Regulator S18V20F24
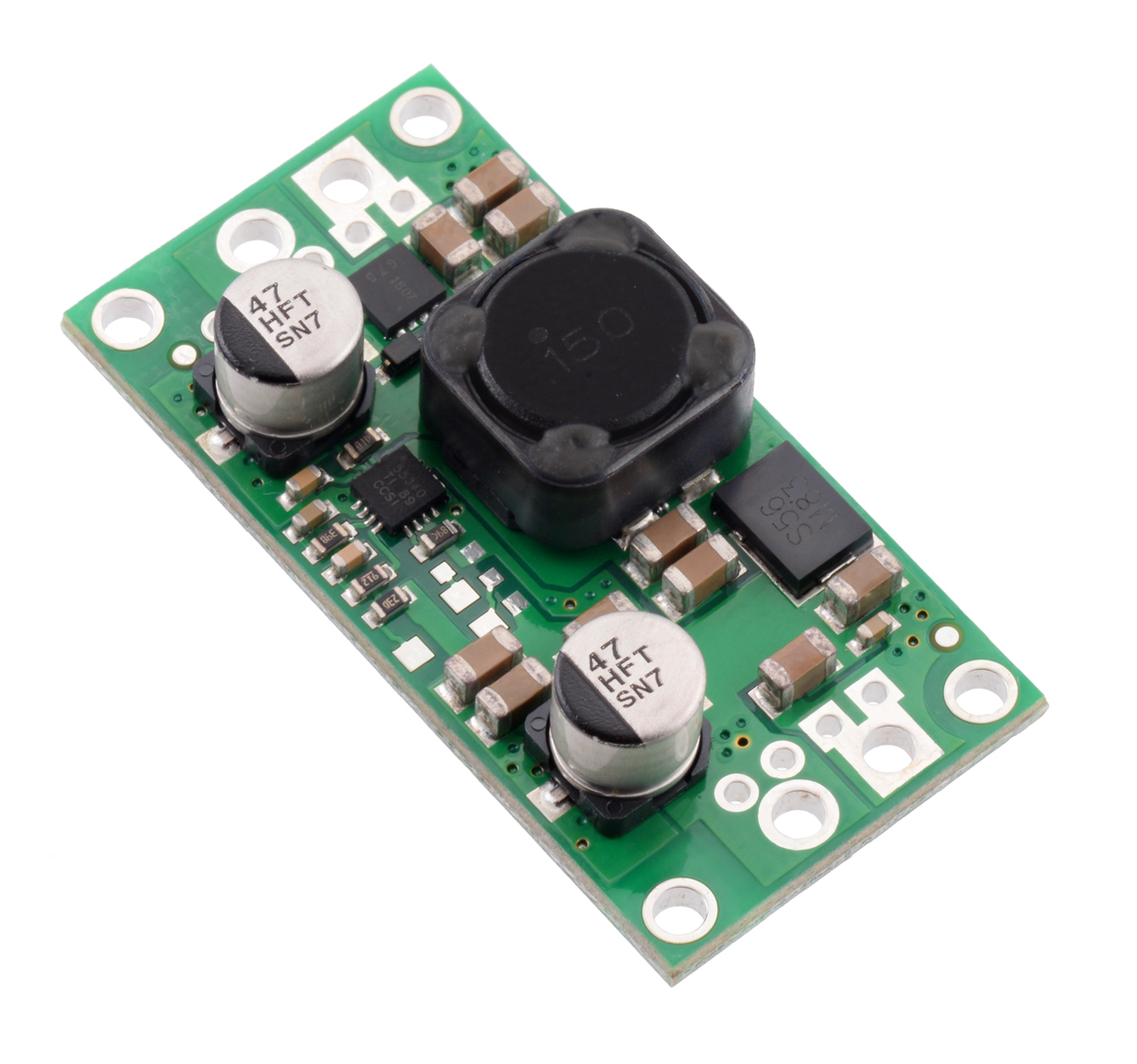 |
The 24V Step-Up/Step-Down Voltage Regulator S18V20F24 is the newest addition to our line of S18V20x step-up/step-down voltage regulators.
This 24 V fixed-voltage version is a minor modification of the 9 V to 30 V adjustable version we have been making for years. We can make custom-voltage versions of most of our regulators, and this particular unit was initially one of those customizations we routinely offer. However, since 24 V seems like it might be common enough to be interesting to other customers, we have made it a stock product. Since we assemble these at our Las Vegas, Nevada facility, we can often make simple customizations that only require component changes within a few days. Besides changing output voltages on regulators, these changes could include changing LED colors, omitting components such as pull-up or pull-down resistors, and substituting components with higher temperature ratings or better tolerances. (We offer more involved customizations that require modified board layouts or new firmware features, but those take longer and have higher up-front engineering costs.)
 |
Pololu electronics manufacturing area with multiple pick and place lines. |
|---|
For those of you interested in the details of the actual product, the S18V20F24 efficiently produces a fixed 24 V output from input voltages between 3 V and 30 V while allowing a typical output current of up to 2 A when the input voltage is close to the output voltage. Its ability to convert both higher and lower input voltages makes it useful for applications where the power supply voltage can vary greatly, as with batteries that start above but discharge below the regulated voltage. Other features include integrated reverse-voltage protection, over-current protection, over-temperature shutoff, and under-voltage lockout.
|
|

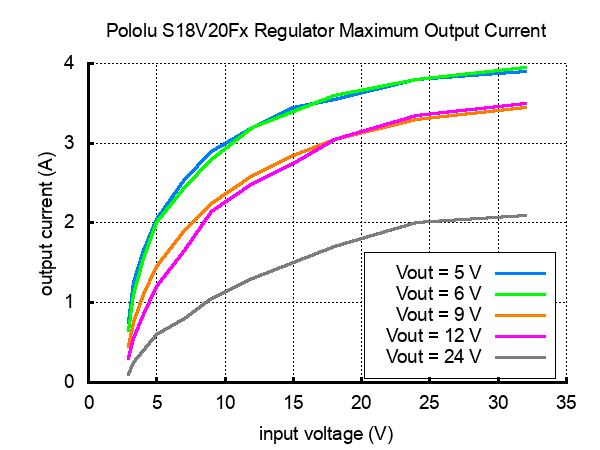
Alternate versions of this regulator include a fixed 5 V, 6 V, 9 V, or 12 V output or an adjustable 4 V to 12 V or 9 V to 30 V output. Our full selection of regulators and power supplies can be found here.
Related products




New products: 16 more QTR reflectance sensor arrays
Our rapidly growing selection of new QTR sensors now includes high-density (HD) versions with 13 and 25 channels, and medium-density (MD) versions with 7 and 13 channels. These QTR sensors are well suited for applications that require detection of changes in reflectivity. This change in reflectivity can be due to a color change at a fixed distance, such as when sensing a black line on a white background, as well as due to a change in the distance to or presence of an object in front of the sensor. Just like the 16-channel medium-density arrays we released in December, the 13-channel medium-density modules use PCBs specifically designed for an 8 mm pitch that allow separate control of the odd and even emitters, which gives you extra options for detecting light reflected at various angles. They have the same board dimensions (101 × 16.5 mm) and mounting hole locations as the high-density (4 mm pitch) 25-channel arrays, but the pinout is different.
|
|
||
|
|

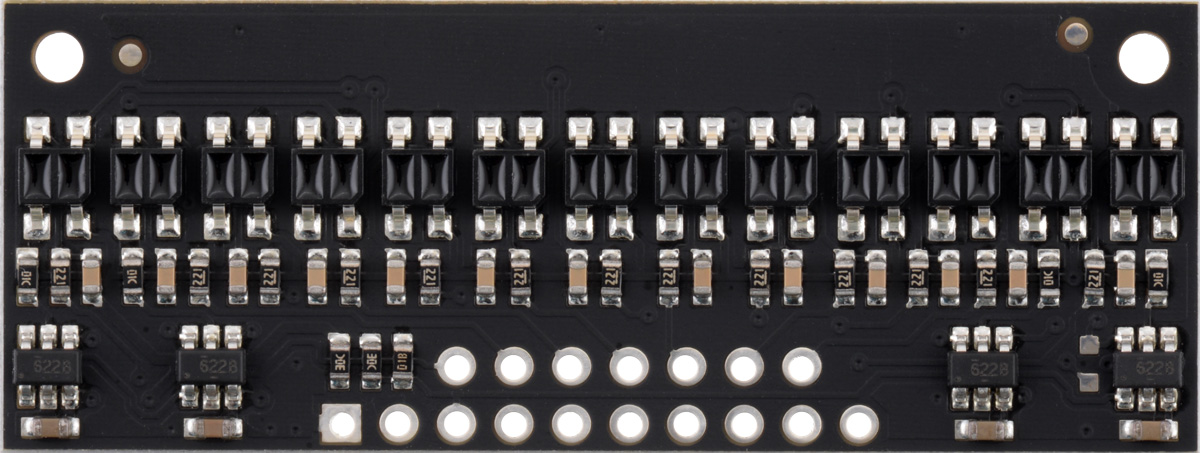


Each of these is available with two sensor options—traditional QTR and high-performance, low-current QTRX—and with analog or digital (RC) outputs, making 16 new products in all. Check out the QTR reflectance sensor category to see our full selection of new-style QTRs with black PCBs, which now stands at 96 varieties, and don’t forget to use our QTR introductory promotion to get 50% off any of these new sensors! (Limited to the first 100 customers who use coupon code QTRINTRO, limit 3 per item per customer.)
Related products
















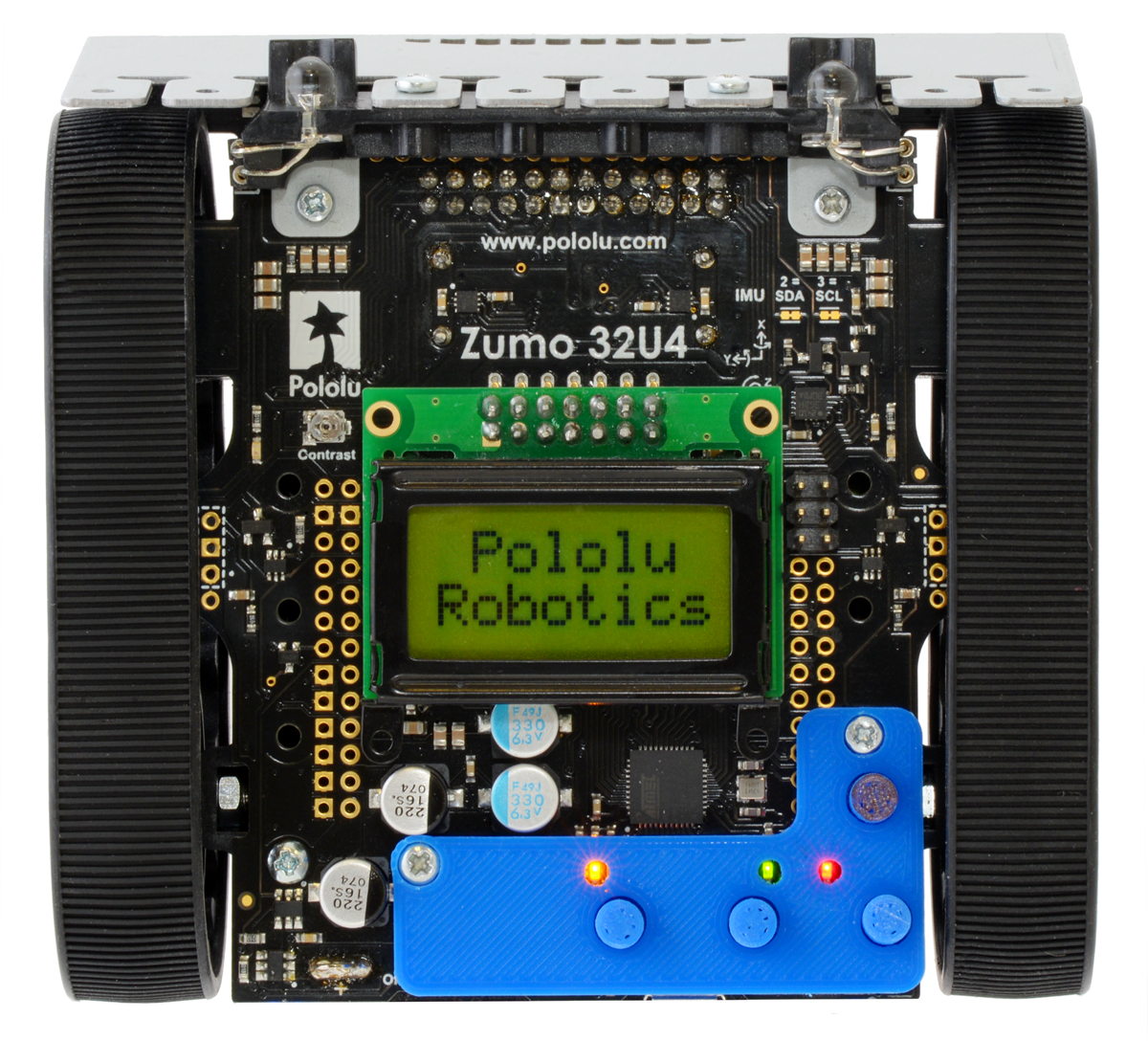
Bigger 3D printed buttons for the Zumo 32U4
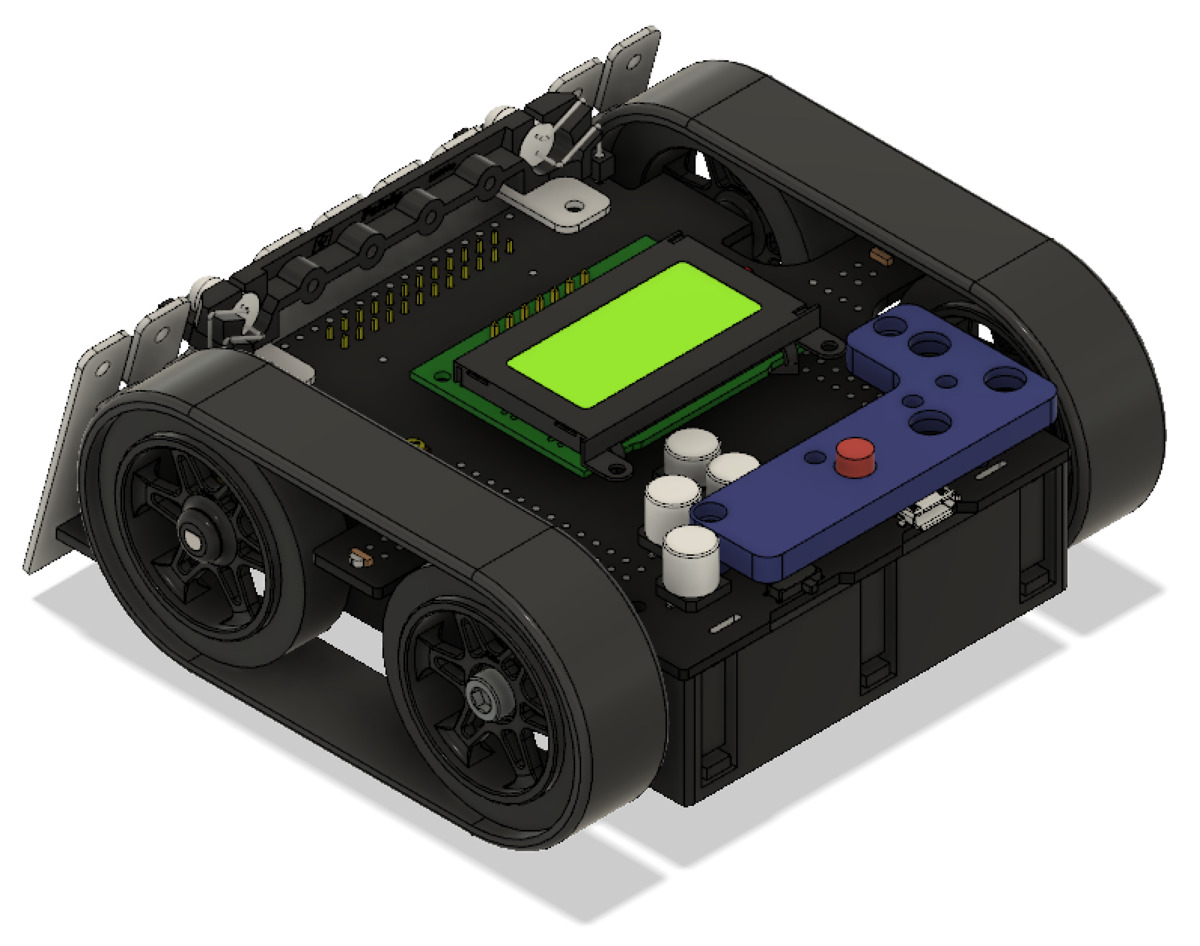 |
Mount Holyoke College professor Peter Klemperer designed a custom add-on for the Zumo 32U4 to give easier access to the user pushbuttons. Peter made the bigger buttons as a response to some of the students in his classes finding it difficult to use the small onboard pushbuttons.
The design even has small cutouts so you can still see the indicator LEDs. To add the adapter plate to the Zumo chassis, you can use two #2 screws and nuts (7/16 inch length screws worked great for me). The easy-to-print STL files along with the Fusion 360 files are available on Peter’s GitHub repository for the project, and you can find more information on Peter’s blog post on his website.
If you print your own bigger buttons for your Zumo 32U4 be sure to let him (and us!) know; we would love to see some pictures! Here’s a shot of the one I printed out for my personal Zumo 32U4:
 |
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation









