Pololu Blog »
Pololu Blog (Page 56)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New products: Magnetic quadrature encoders for micro metal gearmotors

Everyone wants encoders on their motors. If you think you don’t, you just don’t know it yet. I think the main reason is that we really just want motors to do what we tell them to do, but they don’t. One of the most common beginner questions we get is some variation of, “why doesn’t my robot go straight?” or “I got two of the same motor but they do not go the same speed; is something wrong with one of them?” More seasoned robot builders know that since there will always be variations in everything that contributes to a motor’s performance, our best hope is to put a sensor on the motor to monitor what is actually happening and then adjust the motor control to make reality better match our desires. Continued…
New product: Translucent Enclosure for Raspberry Pi Model B+
 |
We are now carrying a translucent enclosure for the Raspberry Pi Model B+!


Free magazines: September 2014 Circuit Cellar and Elektor
|
|
Get FREE copies of Circuit Cellar magazine’s September issue and Elektor magazine’s September issue with your order, while supplies last. To get your free issues, enter the coupon codes CIRCUIT0914 and ELEKTOR0914 into your shopping cart. The Circuit Cellar magazine will add 6 ounces and the Elektor magazine will add 7 ounces to the package weight when calculating your shipping options.
For back issues and more information, see our free Circuit Cellar magazine offers and free Elektor magazine offers.


Big price reductions and new options for our popular stepper motor drivers

We recently substantially reduced prices on our stepper motor driver carriers, and I figured this announcement was a good time to give you an update on our perspective and capabilities.
It has been over five years since I designed our original stepper motor driver carrier, which was for the A4983 from Allegro. While fairly straightforward, the implementation reflected several design philosophies that go into Pololu products, such as making the boards as small as practical and including the right extra components to make the main chip easily usable without unnecessarily limiting its features. Continued…
New product: Addressable high-density RGB LED strip
 |
Last December we started carrying addressable RGB LED strips based on the WS2812B LED driver. Since that driver integrates an LED and a driver into the same package, we were able to offer higher density strips than before.
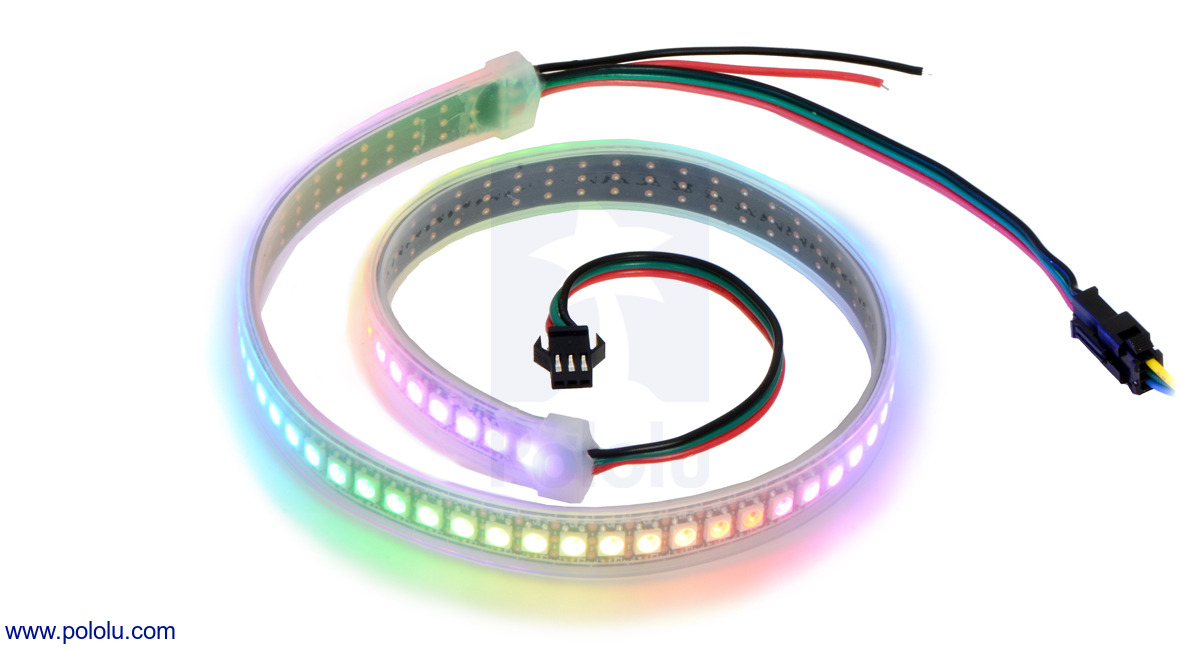
We are excited to announce that we are now carrying an even higher-density WS2812B LED strip. This strip has 72 LEDs and is 0.5 m long, for a density of 144 LEDs per meter. It is also the shortest WS2812B strip we carry.
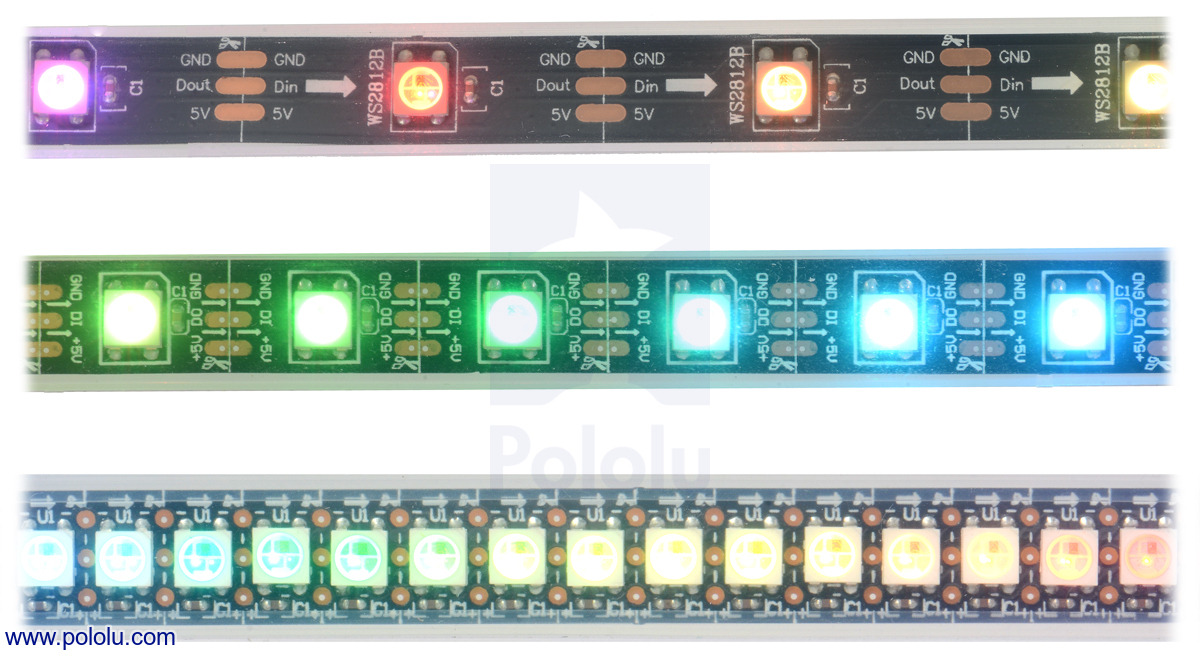 |
LED side of the WS2812B-based addressable LED strips, showing 30 LEDs/m (top), 60 LEDs/m (middle), and 144 LEDs/m (bottom). |
|---|
 |
A 1/2-meter, 72 LED addressable RGB LED strip on the included reel. |
|---|
This LED strip, like the other WS2812B strips we carry, has both input and output JST SM connectors, which make it easy to connect multiple strips together. It is compatible with many popular microcontrollers, and we provide Arduino libraries to help you get started. More information about this LED strip, including how to use it, can be found on its product page.
You can also view our entire selection of WS2812B LED strips.
Related products

Introducing RPicSim
RPicSim is an open source software library written in Ruby that provides an interface to the MPLAB X PIC simulator and allows you to write simulator-based automated tests of PIC firmware. While RPicSim has been available since early this year, we just released version 1.0.0 and are excited to share why we made it and to encourage people to start using it. Continued…
New product: 5V, 2.5A Step-Down Voltage Regulator D24V25F5
 |
Just about every integrated switching regulator datasheet I come across advertises how easy it is to use the chip, which is probably a good sign that it’s not necessarily that easy. I have designed several of our regulator boards, and for the most part, following the manufacturer recommendations and warnings about short traces and small loops led to working designs without much drama. But, as we push for higher performance, it can get tricky, and I thought I would share some fun pictures of what goes into troubleshooting a design that ought to work but did not.
This instance is about the D24V25F5 step-down regulator we just released today. It should have been straightforward because the basic circuit is very similar to that of the higher-power D24V60F5 and D24V90F5 regulators we released earlier this year. Because this board was supposed to be really small, I designed it with components tightly packed on both sides, which meant I had to make compromises on some of those trace lengths and loop sizes. It wasn’t even clear that the circuit would be routable with just two PCB layers, so when I did find a solution, the design team wanted to try it even though we knew we were pushing our luck.
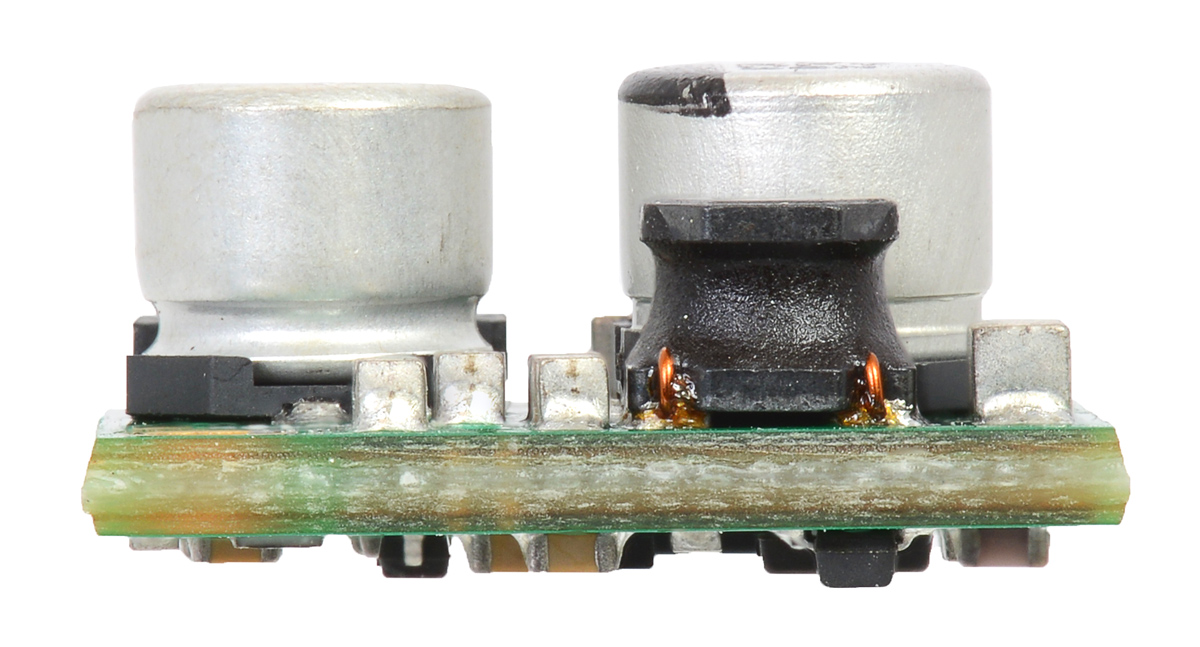 |
Pololu 2.5A Step-Down Voltage Regulator D24V25Fx, side view. |
|---|
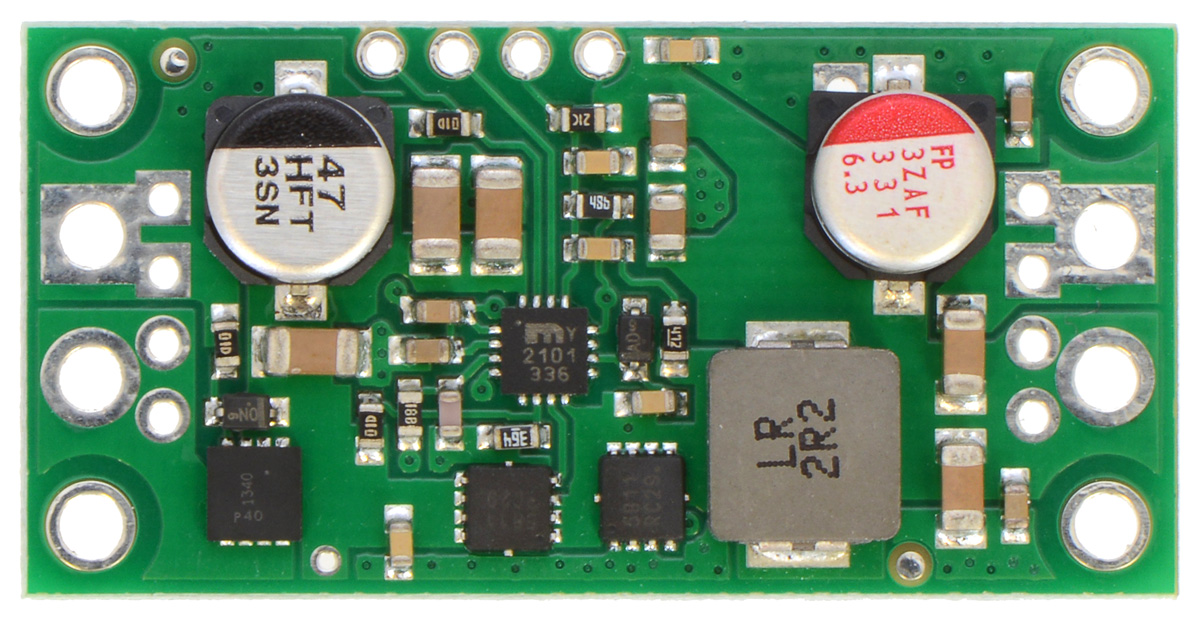
Well, if we had been lucky, you might have been reading a less interesting version of this new product announcement three weeks ago. As is typical for these borderline cases, it was the especially hope-dashing kind of failure where a casual test indicated that the board was working, but more in-depth tests revealed stability and performance issues. To make sure the components were not the source of the problem, we put the exact same components onto the PCB of the larger version that already worked. The pictures below show the D24V60F5 regulator (left) populated with its standard components and the D24V60F5 regulator’s PCB populated with the components for the new D24V25F5 (right).
|
|
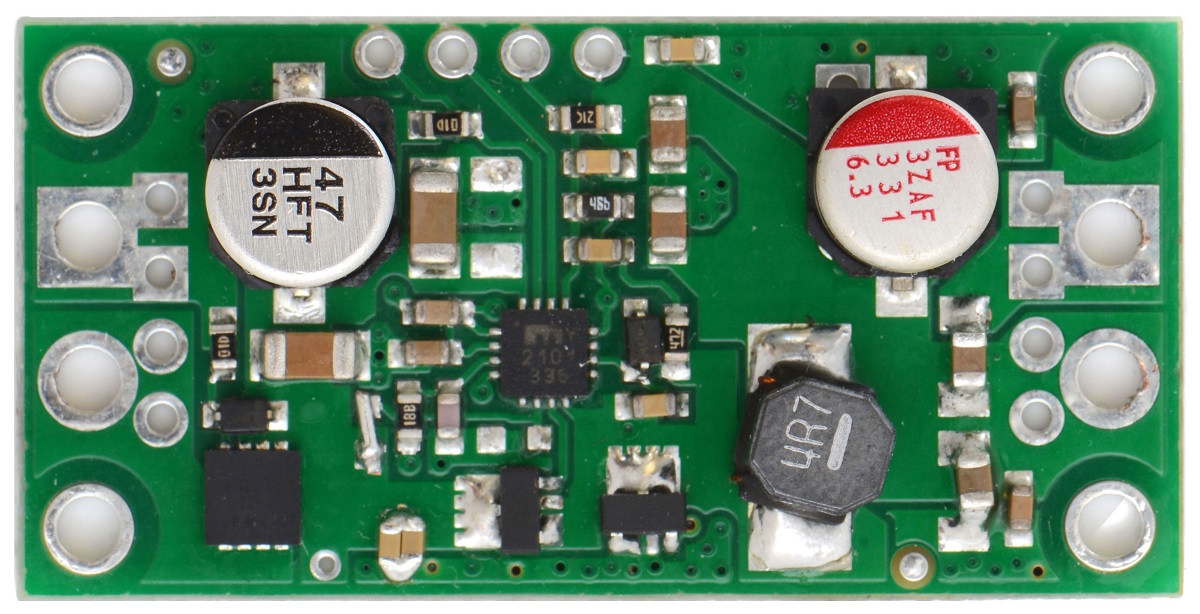
The new components on the old board worked, so after some final checks that the new prototypes were assembled correctly, we knew it was a layout issue. We wanted assurance that the design could work before just diving into a four-layer revision, so I took some prototypes and added redundant connections to see their impact. The pictures below show some of my test boards with varying numbers of additional ground connections.
|
|
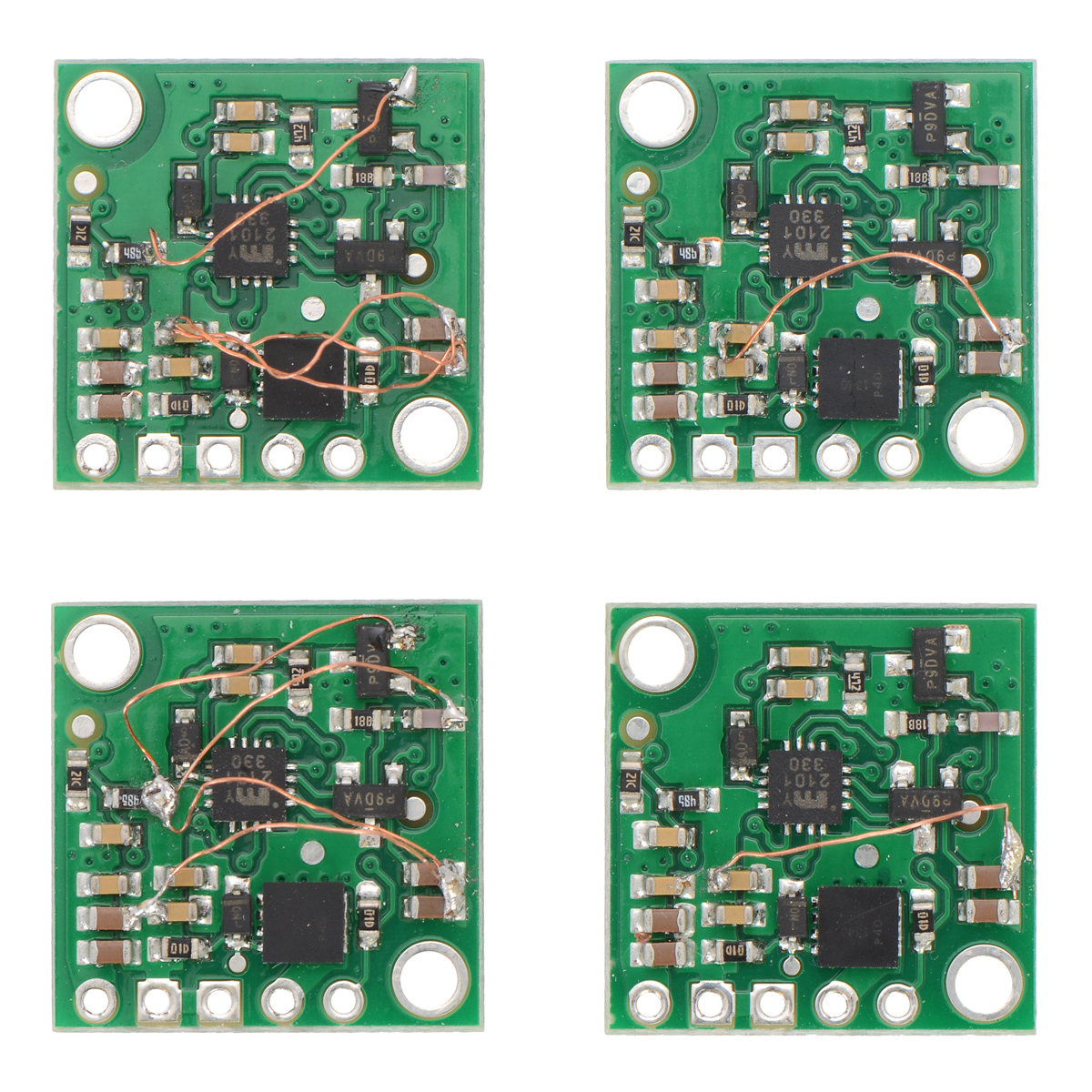

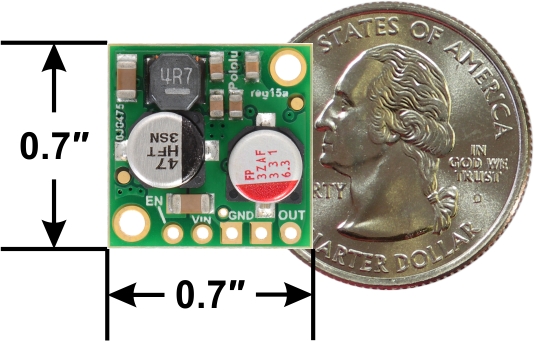 |
I was able to see that the more additional ground connections there were, the more the issues went away. So, I routed the four-layer board, and after a week of tests on over a dozen prototypes, I am happy to announce the release of our most sophisticated regulator yet! The D24V25F5 buck regulator generates 5 V from input voltages of up to 38 V with typical efficiencies of 85% to 95%. The board measures only 0.7″ × 0.7″, but it allows a typical continuous output current of up to 2.5 A.
We are quite happy with how manufacturing of these units is going, so we expect to be moving toward more dense designs like this in future products.
Related products



New products: Pololu Carriers with Sharp GP2Y0A60SZLF Analog Distance Sensor 10-150cm
 |
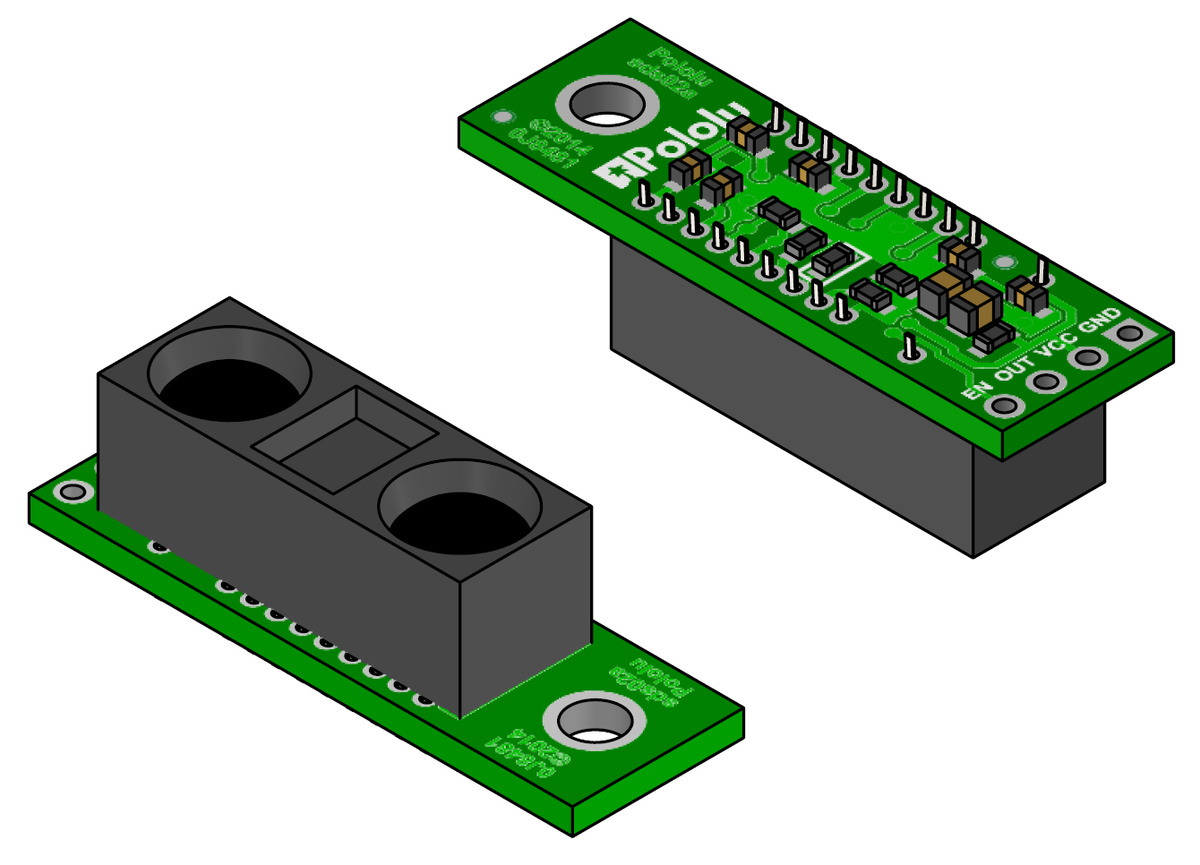 |
3D rendering of the Pololu carrier with Sharp GP2Y0A60SZLF distance sensor. |
|---|
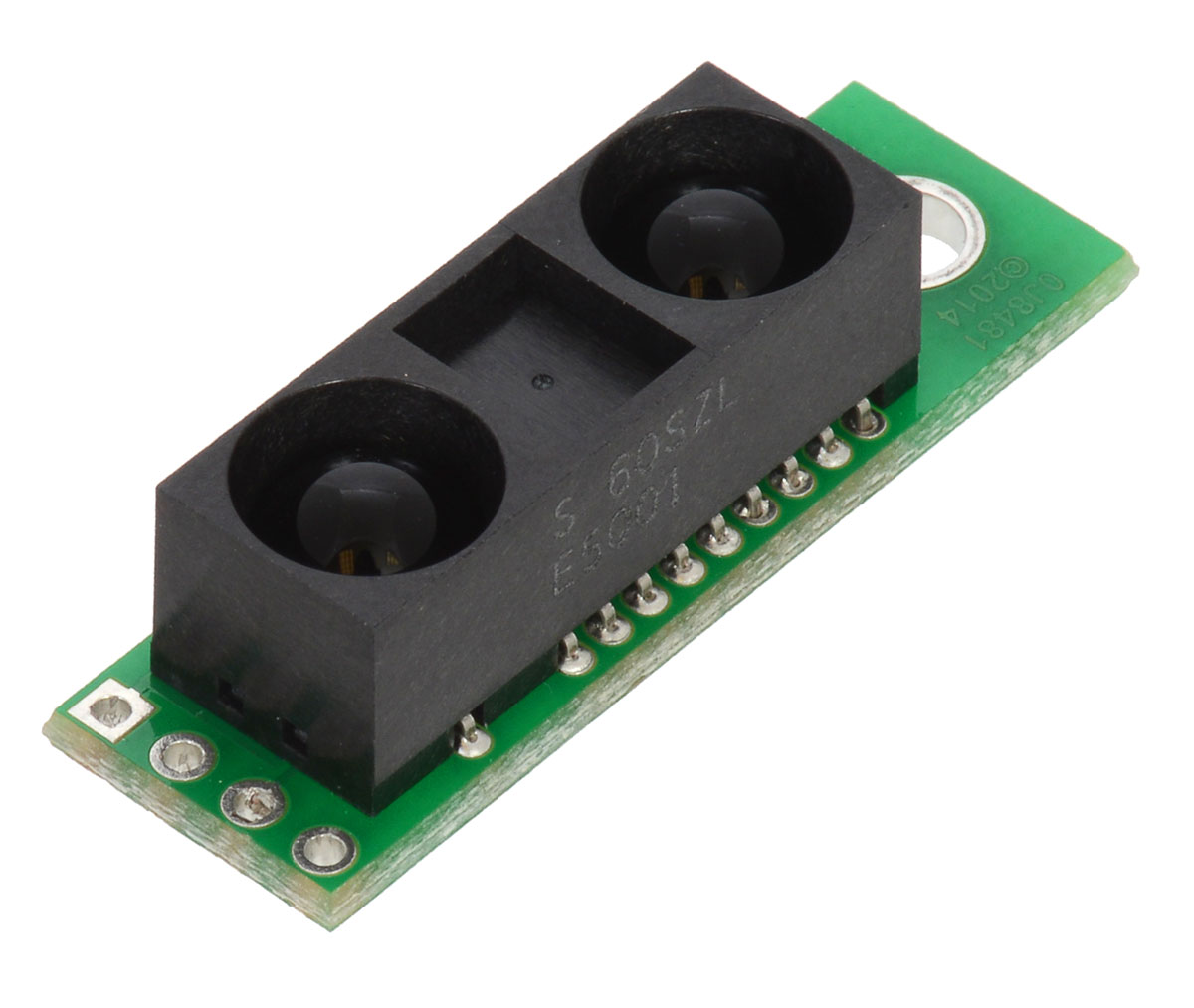
We have released some simple boards over the past few weeks that were developed by our mechanical engineers (see earlier posts for Jon’s board and Brandon’s board). The board I got to design is a carrier board for the Sharp GP2Y0A60SZ 10-150cm analog distance sensor, which is a part we have been trying to get for almost five years.
While the board itself is simple, the GP2Y0A60SZ is exciting for us because it pretty much outperforms all of the other analog Sharp distance sensors. In particular, compared to the more expensive Sharp GP2Y0A02YK0F, which can also detect objects out to a maximum distance of 150 cm, the GP2Y0A60SZ offers half the minimum sensing distance (10 cm) and more than twice the update rate (60 Hz) in a much smaller package:
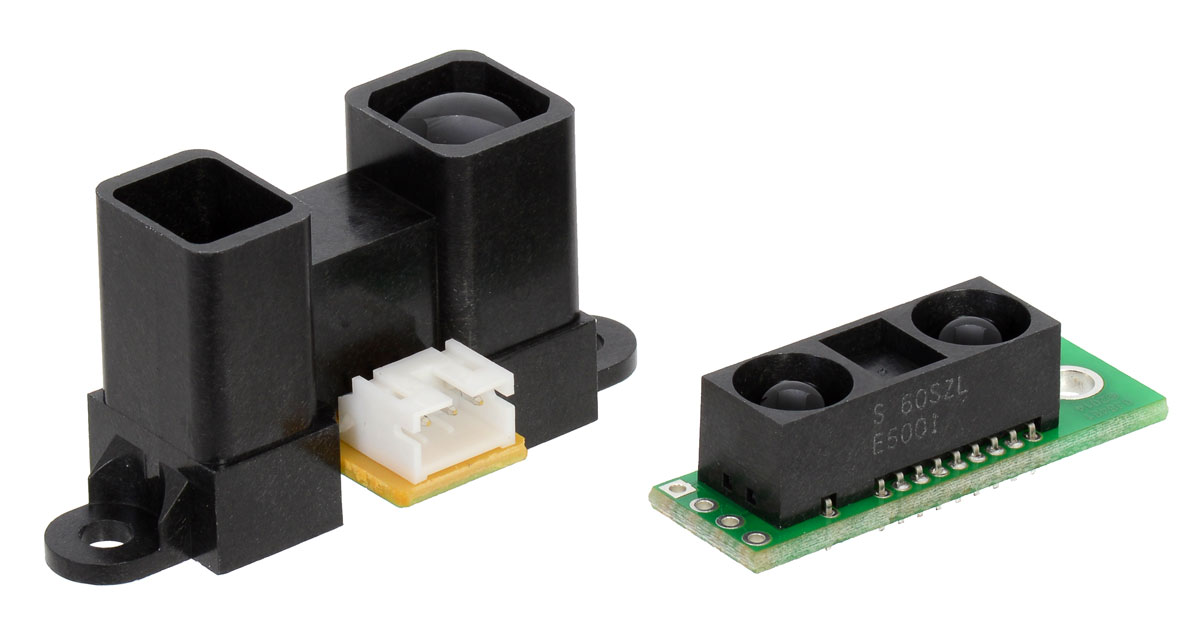 |
Sharp GP2Y0A02YK0F Sensor 20-150cm (left) next to Pololu Carrier with Sharp GP2Y0A60SZLF Sensor 10-150cm (right). |
|---|
One application of these sensors that I am looking forward to is mini-sumo. The features on the sensor make them a great addition to a mini-sumo robot like the one I built for the LVBots mini-sumo competition last year. With these on my robot (the one with the Magikarp on it), I might be able to knock out a few more competitors the next time we have a competition.
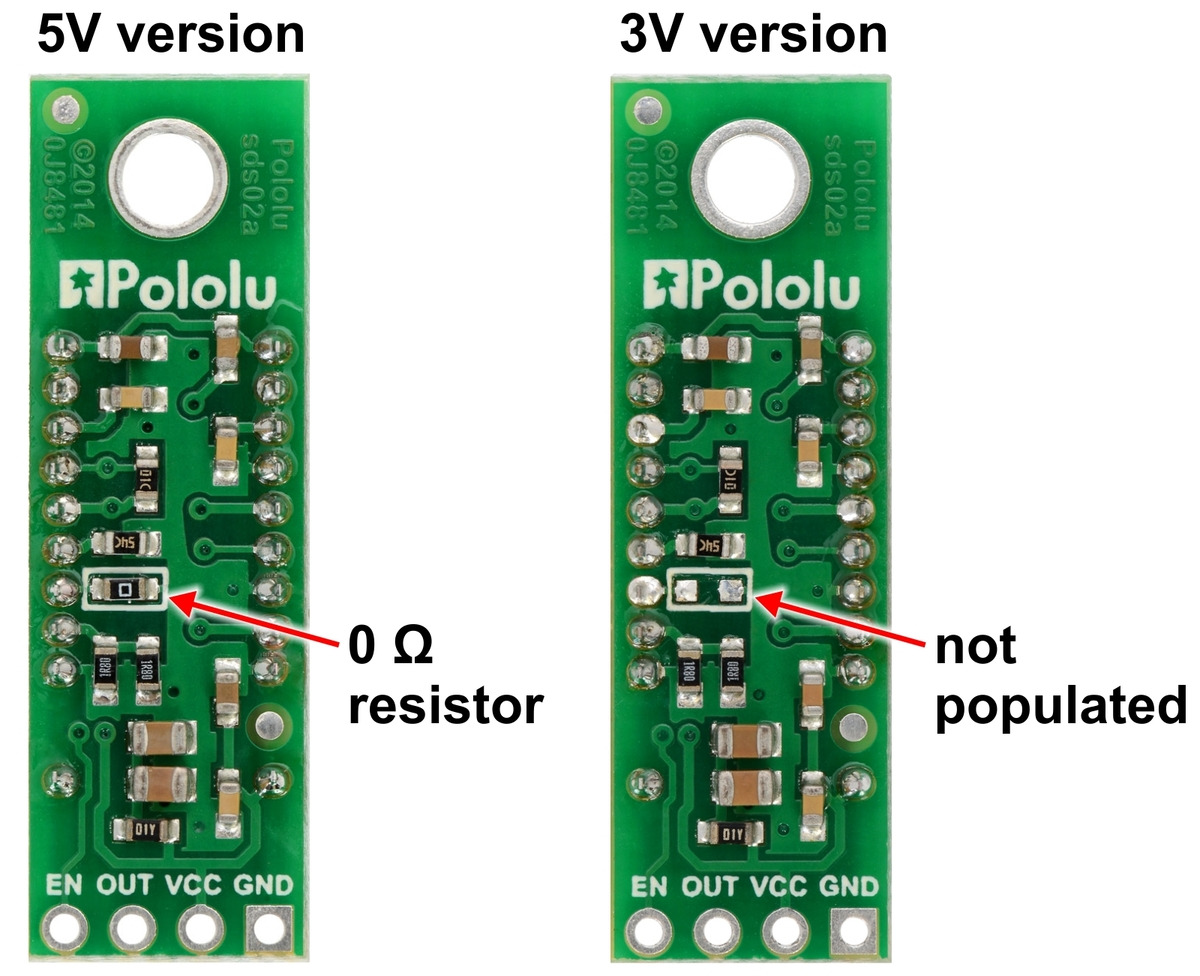
5V and 3V versions available
Our sensor carrier is available in two versions: a 5V version for operation from 2.7 V to 5.5 V and a 3V version for operation from 2.7 V to 3.6 V:
 |
For more information, see the product pages or check out our entire category of optical range finders.
Related products




RoboNUC: Netduino and LIDAR robot
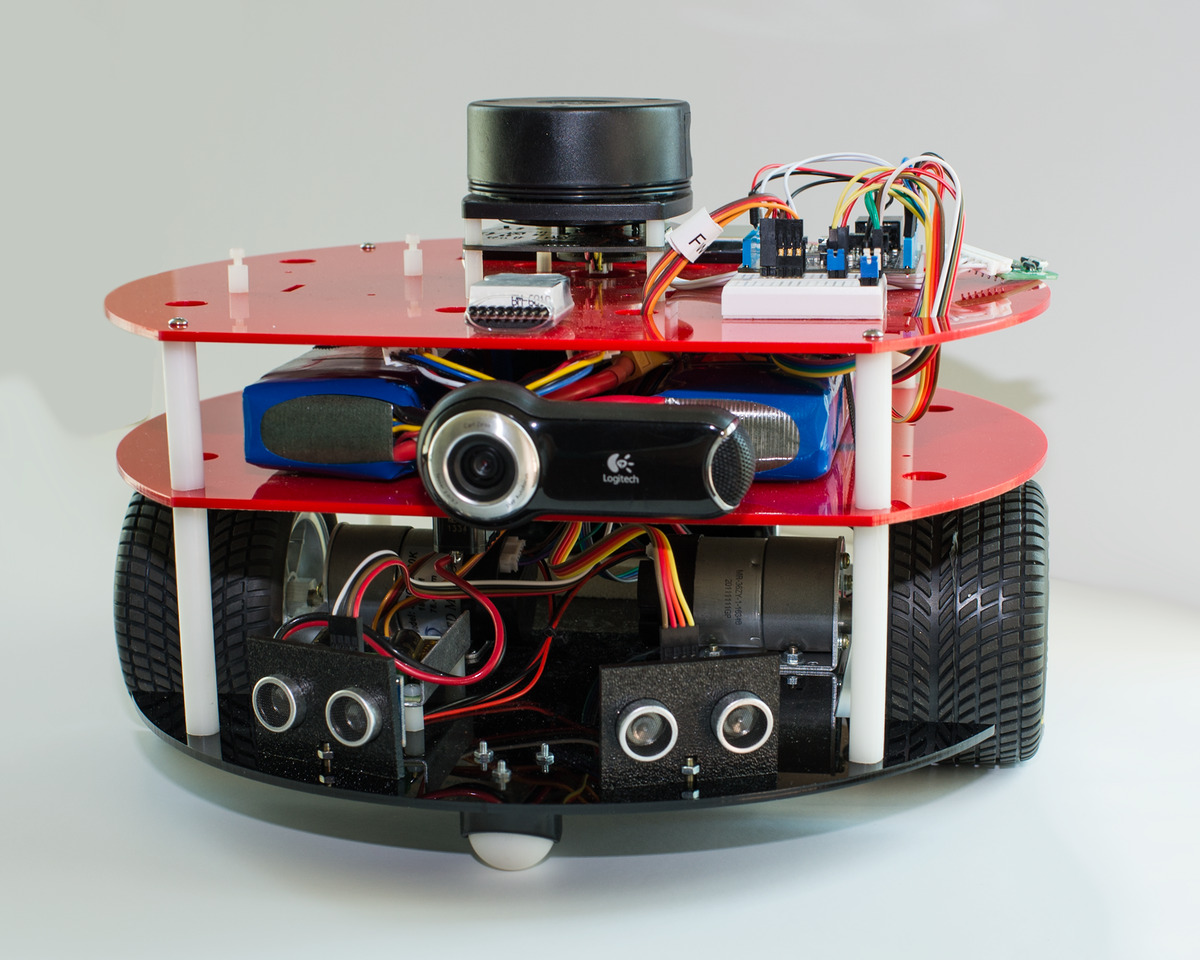 |
Pololu forum member spiked3 recently shared a sophisticated robot he made called RoboNUC. It uses a Netduino and a LIDAR module and was intended to help him learn simultaneous localization and mapping (SLAM). SLAM is a technique used to map an unknown environment and keep track of the device’s location within the environment. Using SLAM, the robot is able to characterize the surrounding areas without needing to physically navigate them. RoboNUC uses our 1″ plastic ball caster, and the acrylic chassis was laser cut using our custom laser cutting service.
For more information about this robot, including a parts list, please see the RoboNUC Recap blog post at Spiked3.com.
Related products

New product: Sharp 15cm GP2Y0D815Z0F digital distance sensor
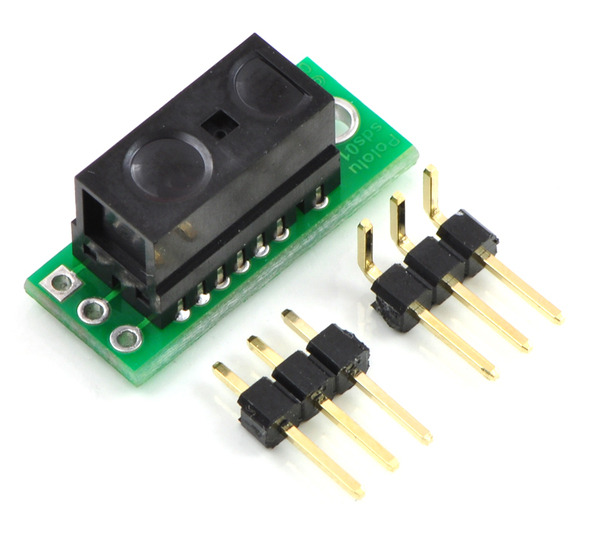 |
Sharp’s optical rangefinders and distance sensors have long been a favorite among robot builders for quick, easy, and affordable obstacle detection. We are excited to add to our selection the new digital GP2Y0D815Z0F sensor, which can detect objects ranging from 15 cm (6″) to almost touching the sensor face. The GP2Y0D805 and GP2Y0D810 digital sensors we have had for years are great because of their small size, high sampling rate, and small minimum sensing distances, but their short detection ranges have limited their applications. We have always wanted a version that could see farther, and now we have one! We have the sensor available by itself and on a carrier that makes connecting and mounting it a lot more convenient.
Related products




Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation









