Pololu Blog »
Pololu Blog (Page 80)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
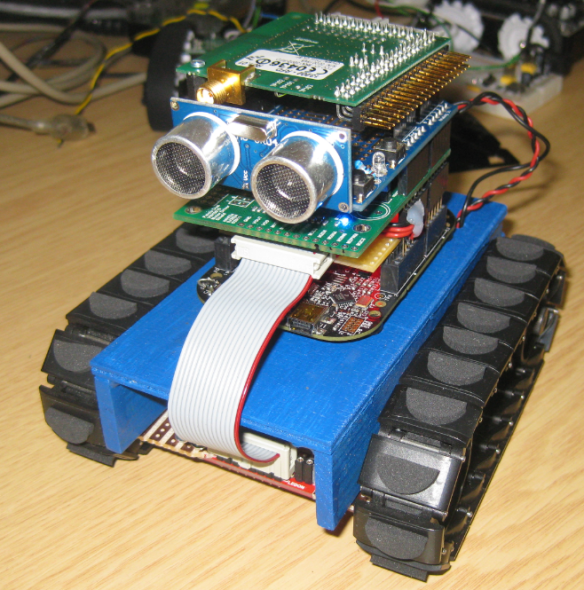
RK-1 robot
 |
This successful kickstarter project is a wifi-enabled robot that is controlled through an iOS or Android app. It uses an Arduino, Pololu track set, and micro metal gearmotors.
Featured link: http://mymobilerobots.com/rk1/
Bluetooth interface for a chronograph
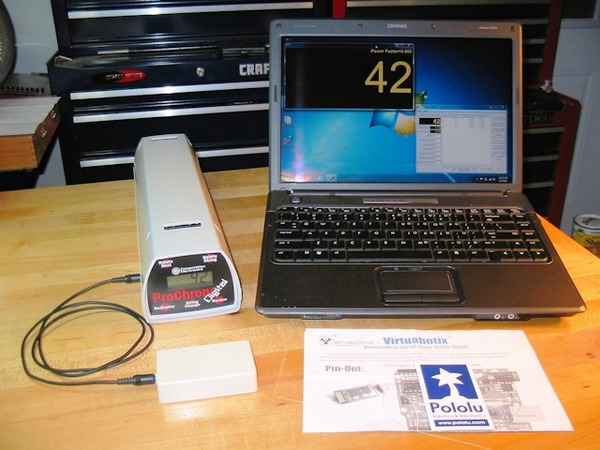 |
This Bluetooth interface to the serial output of a chronograph uses Pololu’s NCP1402 voltage regulator.
Featured link: http://forum.pololu.com/viewtopic.php?f=2&t=7040
Digital Capabilities: a digital garden
 |
This digital garden by the University of Lincoln uses a Raspberry Pi, 20 jrks, and linear actuators to move panels, revealing the plants behind them, in response to tweets. More information is available on the project’s website. The project was awarded a gold medal at London’s Chelsea Flower Show.
Featured link: http://www.youtube.com/watch?v=DWdqyHa6mnI
Missing by The xx – Spatializing Sound with Sonos
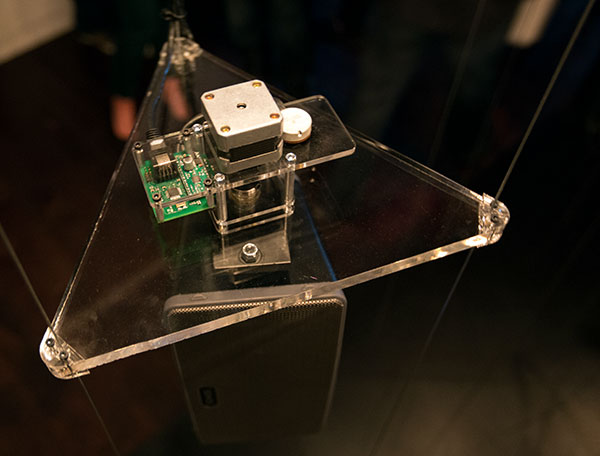 |
“Missing” features fifty robotic speakers that rotate to face the listeners. Each speaker uses an A4988 Stepper Motor Driver Carrier.
Featured link: http://www.creativeapplications.net/sound/missing-by-the-xx-spatializing-sound-with-sonos/
Wireless Fenrir
 |
Fenrir, a 12-foot-tall metal fire-breathing wolf sculpture by Sheet Metal Alchemist, now has a Wixel-based wireless controller.
Featured link: https://www.youtube.com/watch?feature=player_embedded&v=Z78yYVYq6mY
Pocket-sized USB charger adapter
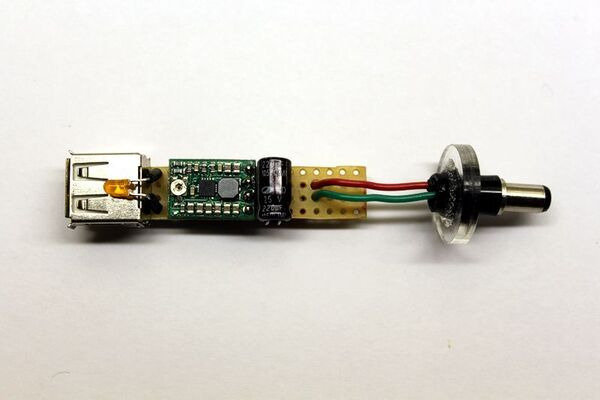 |
This Instructable shows how to make a professional-looking power adapter for charging USB devices using a Pololu Adjustable Step-Up/Step-Down Voltage Regulator S7V8A.
Featured link: http://www.instructables.com/id/Pocket-Sized-POLOLU-5V-Output-as-POWERTUBEs-acces/
Barobo Linkbot
 |
Check out this kickstarter: the Linkbot modular robot by Barobo uses Pololu motors.
Featured link: http://www.kickstarter.com/projects/barobo/linkbot-create-with-robots
VertiBOT
 |
VertiBot is a neatly-constructed balancing robot. Pololu metal gearmotors, wheels, and a Qik dual serial motor controller were used for this project.
Featured link: http://madebyfrutos.wordpress.com/2013/05/02/vertibot/
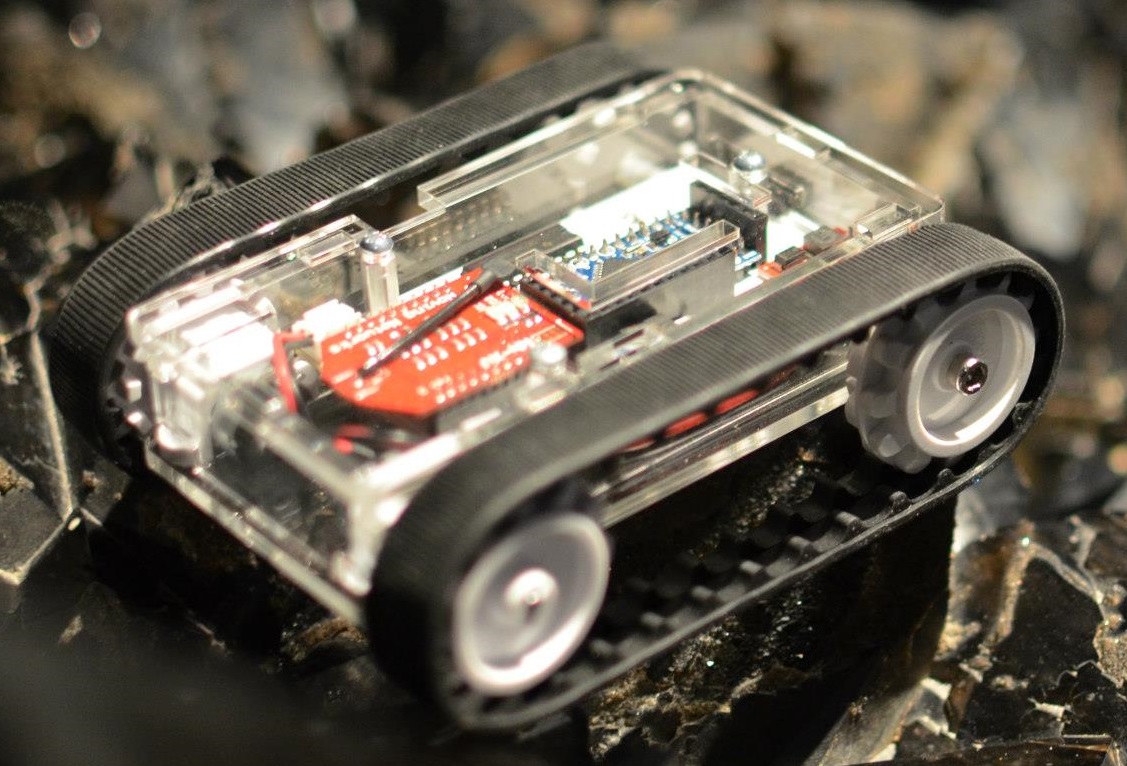
Tiny Bot
 |
Tiny Bot, by Erik Kringen, is an autonomous obstacle-avoiding robot tank that uses a Pololu track set.
Featured link: http://www.mycontraption.com/introducing-tiny-bot/


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation










