Pololu Blog »
Posts tagged “maestro”
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
Firmware update for the Micro Maestro to fix position update bug
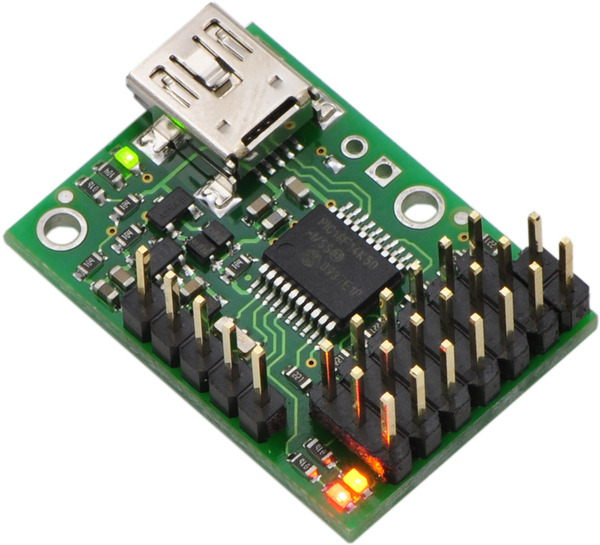 |
We have released firmware version 1.04 for the Micro Maestro 6-Channel USB Servo Controller.
This update fixes a bug where receiving any serial command via TTL serial or the Maestro’s USB virtual serial port could potentially interfere with the Maestro’s servo update routine. The servo update routine is responsible for smoothly changing the position of each servo over time while respecting the Maestro’s configurable speed and acceleration limits. Because of the bug, receiving a serial command could cause position updates for some servos to happen too soon or to be skipped entirely. Repeated serial commands at high baud rates could also trap the Maestro in the servo update routine, causing it to become unresponsive.
This bug has been present since we first released the Micro Maestro almost 10 years ago in November of 2009, but its effects tend to be subtle, and we only learned about it a few weeks ago when a customer brought it to our attention.
This bug does not affect the 12-channel, 18-channel, and 24-channel Mini Maestros, so there is no corresponding update for them. The latest Mini Maestro firmware version is still 1.03.
For information about how to upgrade your 6-channel Micro Maestro, see the “Upgrading Firmware” section of the Maestro user’s guide.
Maestro-controlled robot arm conducts rolling ball kinetic sculpture
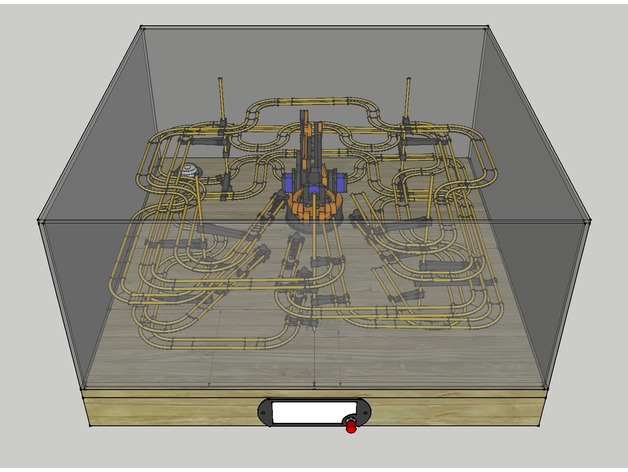
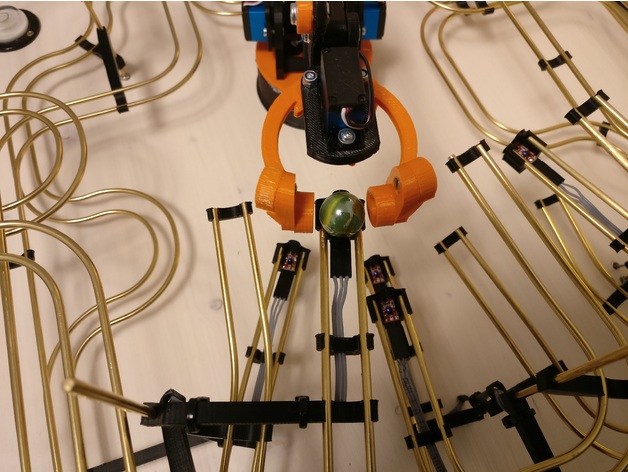
Erik Pettersson’s interactive sculpture, Roball, is a gripping take on the classic rolling marble kinetic sculpture. Roball uses a robotic arm to pick up a small ball and randomly place it on one of five tracks, where it twists and turns as it rolls down the track, eventually coming to rest at a holding station. The input to the system is a single pushbutton, and when the user presses the button, the arm picks the ball up wherever it stopped. Then, the device randomly selects another path, moves the marble to the start of that track, and releases it. A 12-channel Maestro controls the whole system and analog sensors (which might be our QTR-1A) at each holding station at the end of each track help not only detect the ball, but help the Maestro randomize its next move. Because of the ball’s non-uniform surface, the analog sensor will read different values depending on how the ball is positioned. That reading is then used in a calculation to determine what track to roll the ball on next.
You can learn more about this project on its Thingiverse page.
|
|
Related products


Five Mini Maestros control an interactive array of 98 mirrors
MIRR, which stands for Mobile Interactive Responsive Reflector, is an interactive installation that responds to people’s movement by independently rotating elements in its array of 98 mirrored panels. A FEETECH Mini Servo FT1117M actuates each panel and a total of five Mini Maestros control the servos. People can also use a custom box of arcade buttons to independently move each panel. You can read more about how MIRR works in this post on our forum.
|
|


Related products


Maestro animated pilot in RC model aircraft
 |
A Maestro commands this Luftwaffe pilot to direct his steely-eyed gaze out into the wild blue yonder. |
|---|
Klaus Herold, who makes RC models of World War II aircraft, used one of our Maestro servo controllers to elevate one of his German Luftwaffe models to new heights. A 6-channel Micro Maestro adds a touch of reality to his model by animating the movement of the head of the pilot. The movement has two degrees of freedom: the head rotates side to side and tilts up and down. Additionally, the cockpit canopy extends and retracts. You can see the pilot in action in the video below:
Related products

Mars Rover
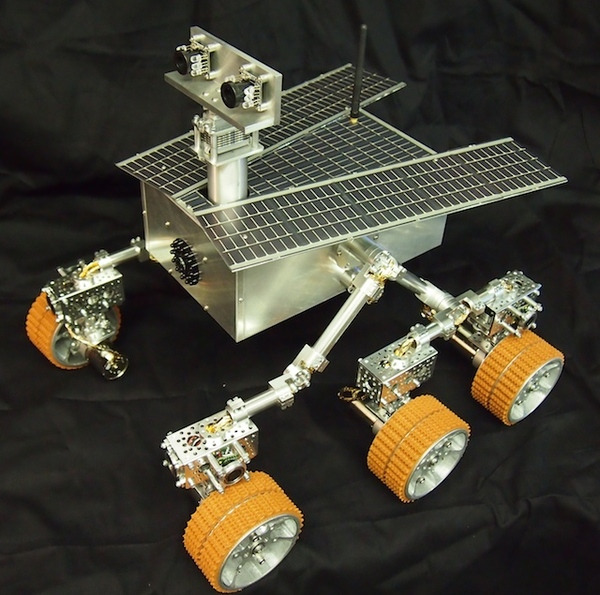 |
The Beatty family built a moving model of a Mars rover for the New York Hall of Science’s exhibit. They used a 12-channel Mini Maestro and step-down voltage regulators. Pictures and a link to a video are available on their blog.


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation







