Pololu Blog »
Pololu Blog (Page 47)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
New product: 0.1″ low-profile male LCD header
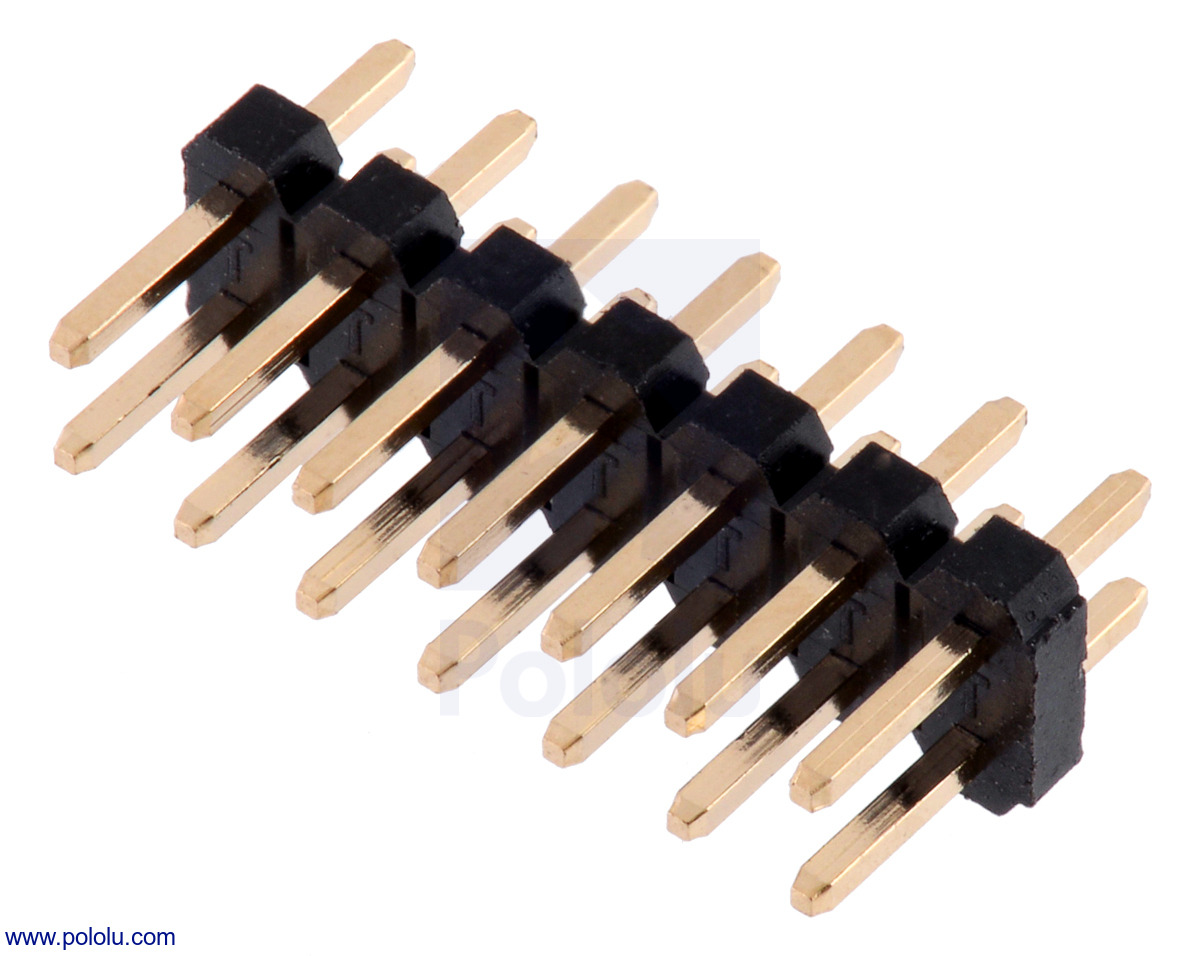 |
We are now selling the low-profile 2×7 male LCD header included with the Zumo 32U4 robot kit.
Related products


Amanda's line following robot: Newbie
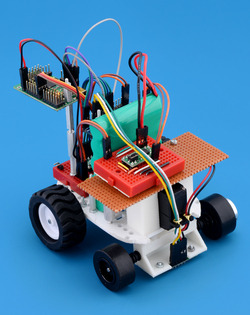
Many of the engineers and robot enthusiasts here at Pololu competed in the LVBots 2015 line following competition. (For house rules and details about how the competition was judged, see the LVBots line following rules page.) Unlike most of my peers this was my first competition at LVBots, so I thought it was fitting to name my robot “Newbie”. Newbie uses a servo to steer the front wheels, creating fluid movements in and out of turns. At least that was the plan; unfortunately, Newbie had complications. Continued…
New distributors in Europe
Continuing to catch up on our new distributor introductions, we are excited to welcome these new European distributors:
 |
 |
 |
 |
 |
 |
 |
 |
Now, here is that cool video of TME’s warehouse:
See the full list of over 200 distributors to find one in your area.
Wixel software now works on the Raspberry Pi
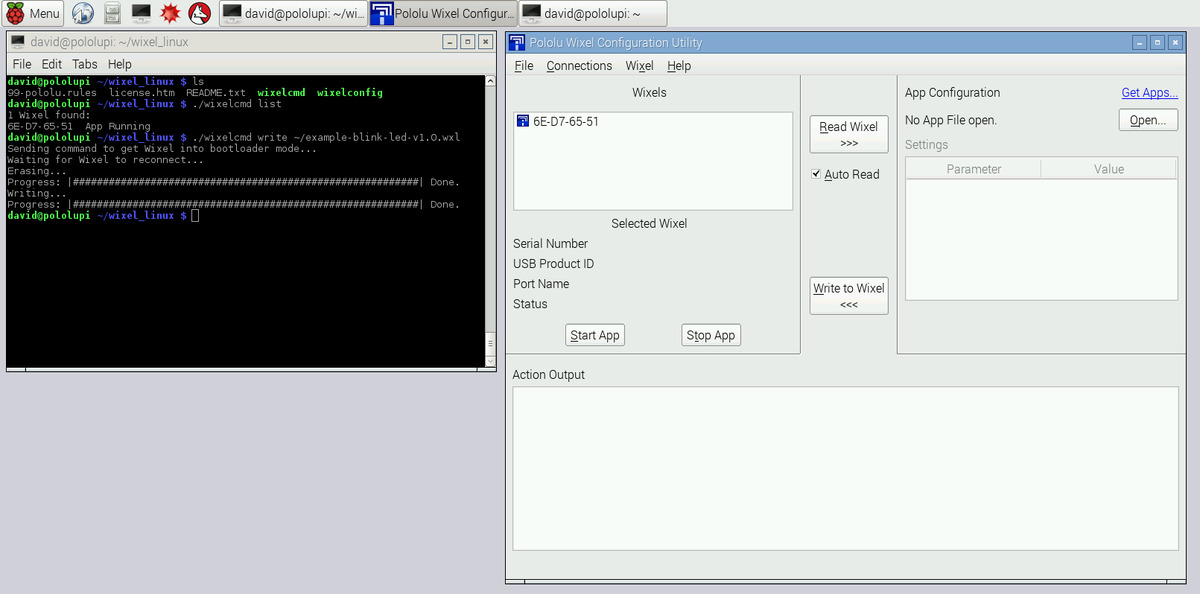 |
We have released a new build of the software for our Wixel Programmable USB Wireless Module that works on ARM Linux systems like the Raspberry Pi. This means that you can now upload apps to a Wixel from a Raspberry Pi, without needing a typical desktop computer. You can find the software download in the Wixel User’s Guide.
We have seen people use Wixels to help monitor blood glucose levels, create wireless quiz buttons, or wirelessly control servos. For a complete list of all the Wixel apps we know about, see the Wixel Apps list on our forum. We hope that the expanded software support for the Wixel will help people create new applications in the future.
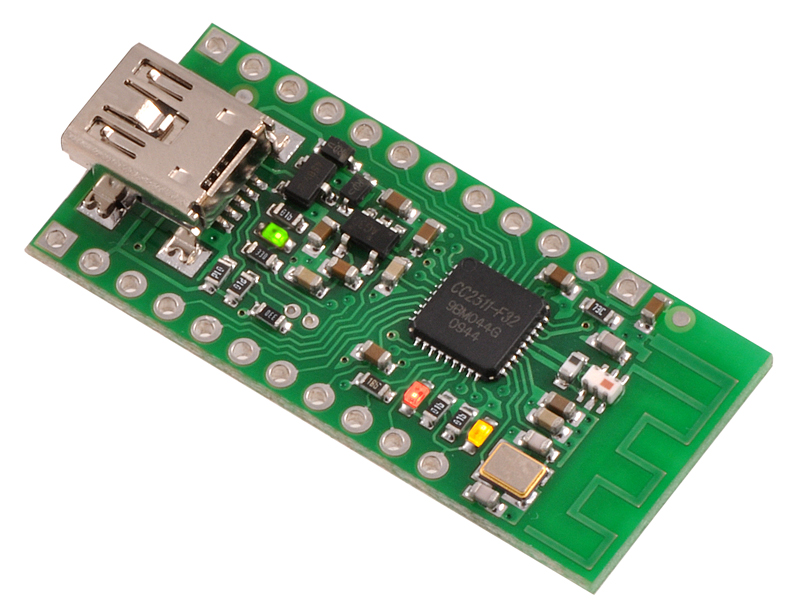 |
Wixel programmable USB wireless module. |
|---|
Related products





New product: Breakout Board for microSD Card with 3.3V Regulator and Level Shifters
 |
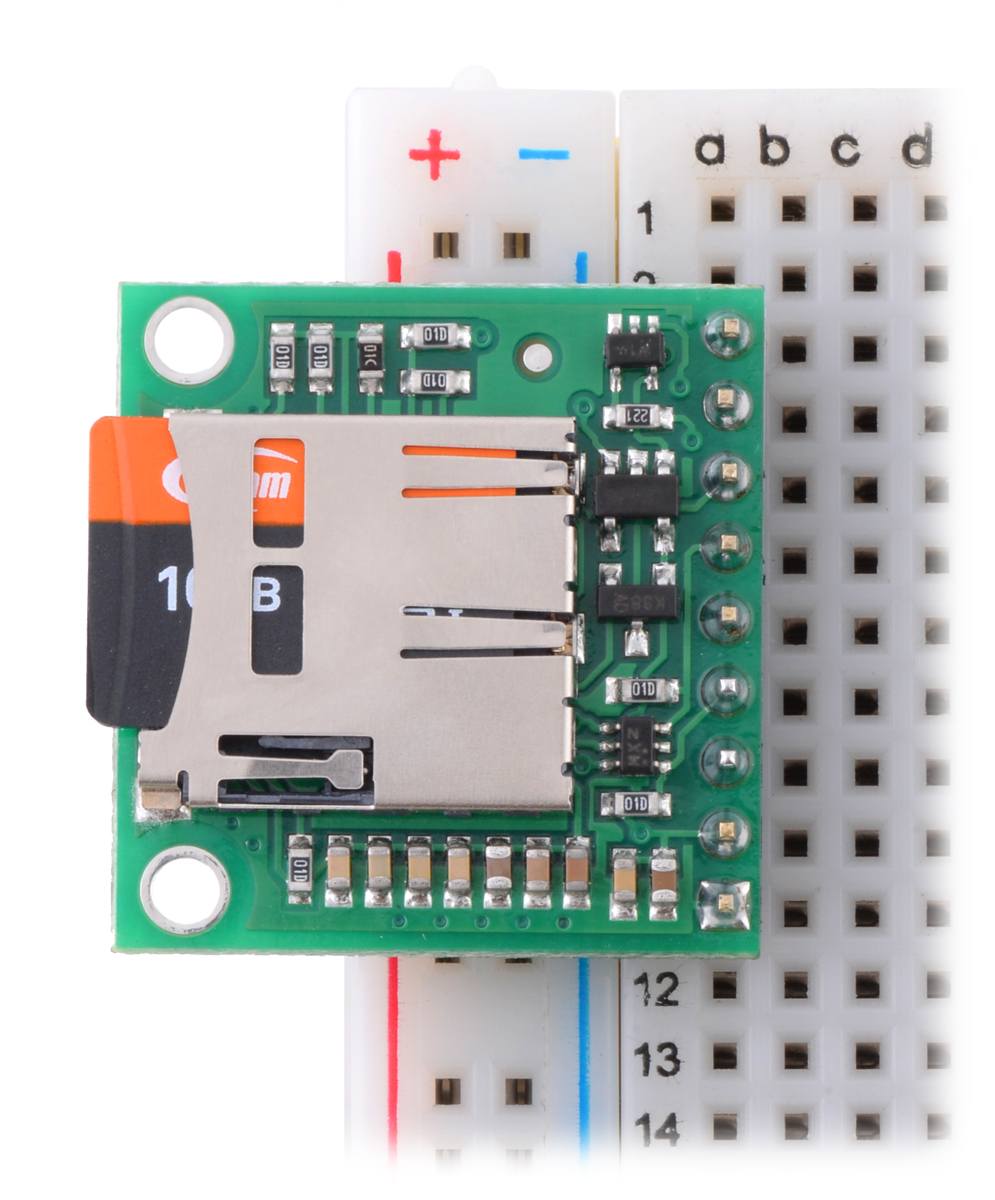
In September of last year, we started carrying our Breakout Board for microSD Card, which was the first board that I ever designed and routed here at Pololu. It is a simple breakout board that gives direct access to each contact available on a microSD card socket. However, since microSD cards operate at 3.3 V, it can be tricky interfacing them with a 5 V system. To address this, we made a new version with an integrated 3.3 V regulator and level shifters. Even with the extra components (and mounting holes, which the mechanical engineers at here Pololu are always pushing for), the board is still compact, measuring only 0.94″ × 0.9″, and it breaks out all of the contacts from a microSD card socket necessary to interface with the card through its SPI bus mode interface to a single 1×9 row of 0.1″-spaced pins. This allows easy use with breadboards, perfboards, or 0.1″ connectors.
 |
You might recognize the circuit from our A-Star 32U4 Prime controllers, which use essentially the same level shifters to interface a microSD card with an Arduino-compatible ATmeg32U4 microcontroller running at 5 V.
For more information about this breakout board, see its product page.
Related products




Grant's line following robot: Pinto

My entry for the LVBots line following competition last month was a rehash of my line following robot from last year, Pinto. Unfortunately, my robot from last year robot never made it to the competition: while trying to get it to work last minute, it literally vibrated itself apart. I did not execute my ideas very well, but I still think my overall plan was not a bad one. Since I still had all the parts, I decided I wanted to revive the robot and try to follow through with my plan. Continued…
Nathan's line following robot: Suckbot

After branching off into maze solving, pushing into sumo, and finding our way through dead reckoning, we circled back and had another line following competition at LVBots. I started designing the Suckbot before the previous line following competition over a year before this one, but the design dragged on and there was no urgent push to get it finished without another competition. The robot is designed to suck itself down to the course so it can go faster. I was able to get it following lines and sucking, and I managed to post some middle-of-the-pack lap times, but there was some unexpected behavior when tuning the PID parameters just before the competition, and I think there’s quite a bit of room for improving the robot’s performance in the future. Continued…
Memorial Day weekend sale
 |
We are having a big Memorial Day sale now through Monday, with discounts on over 600 products when you use the coupon code MEMORIALDAY15. Stock up on robot parts now so you can build cool things all summer long! Note that we will be closed on Monday, so orders will not ship until Tuesday, May 26.
For more information, including all of the sale items, see the sale page.
New high-current stepper driver carrier with SPI: AMIS-30543
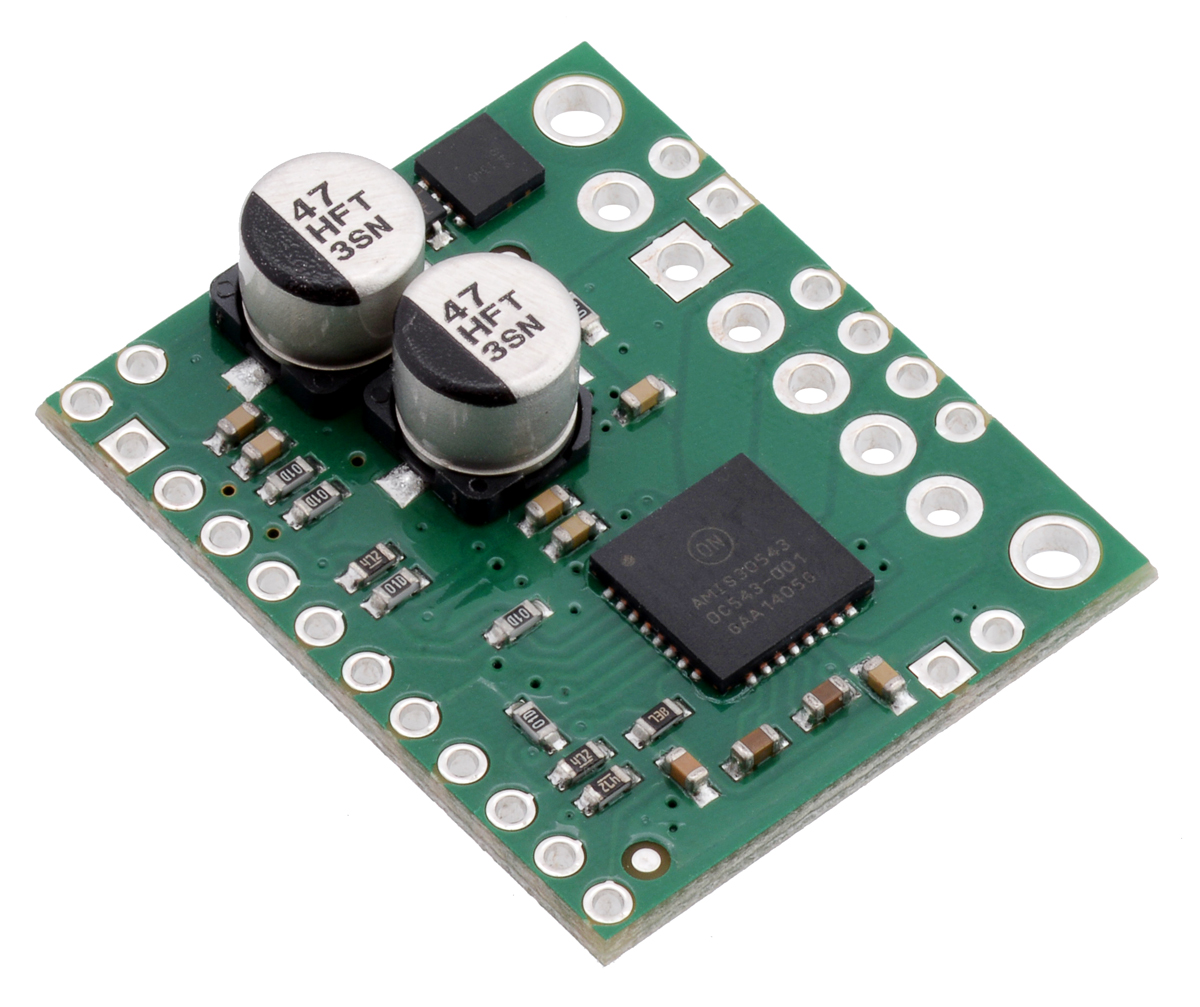 |
This new board is a Pololu carrier for ON Semiconductor’s AMIS-30543 Micro-Stepping Motor Driver, which is a high-performance stepper motor driver with advanced features not found on our other stepper motor driver carriers.
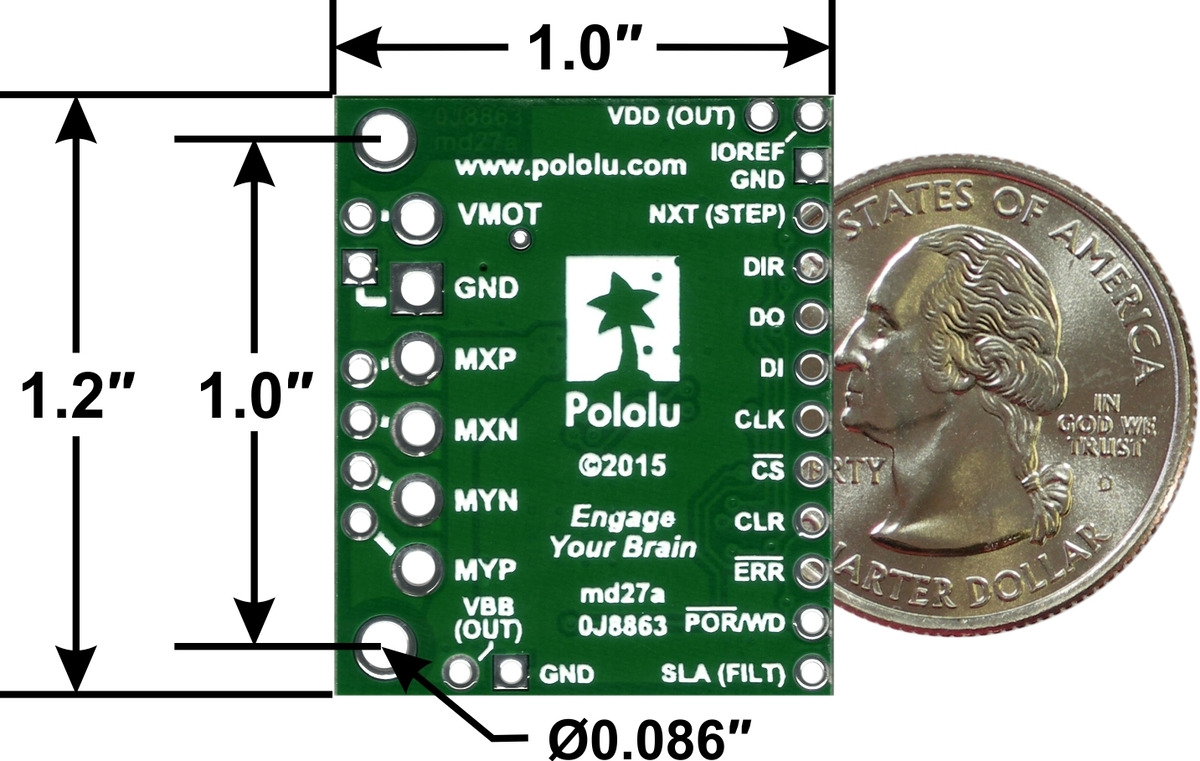 |
AMIS-30543 stepper motor driver carrier, bottom view with dimensions. |
|---|
The Pololu AMIS-30543 Stepper Motor Driver Carrier breaks out all of the important pins of the driver onto breadboard-compatible 0.1"-spaced pins, with optional terminal blocks for the power and motor connections and mounting holes for a more robust setup. Our board supplies reverse protection and all the necessary circuit components for interfacing to a microcontroller.
The AMIS-30543 is rated up to 30 V and 3 A, but (as with other stepper drivers) the current rating is a theoretical maximum assuming excellent cooling. Using our board at room temperature without a heatsink, the chip can practically supply about 1.8 A per coil, more than any of our other stepper motor driver carriers.
The SPI interface of the AMIS-30543 provides many exciting features: it lets you configure microstepping (down to 1/128-step), set the current limit, select voltage slopes, change direction, disable the outputs or put the driver to sleep, monitor the micro-step position and errors, and more. Please note, however, that you cannot step the motor over SPI.
Many of our customers have asked for software current limit control, since it allows better power management. For example, consider that stepper motors counter-intuitively use their maximum current when stopped, even if there is no holding torque required. This wastes a lot of power and generates undesirable heat in the drivers and motors. In a typical application like a 3D printer, where you don’t need much holding torque, you would want to reduce the current limit to a low value during pauses. You might use a higher limit (above the continuous limit) when accelerating and an intermediate value for constant-speed motion. The SPI current limit control on the AMIS-30543 lets you do all of this in your code.
Another advanced feature is the SLA (speed and load angle) output that indicates the level of the back-EMF voltage of the motor. This is an analog signal that can be used for stall detection or closed-loop control of the torque and speed:
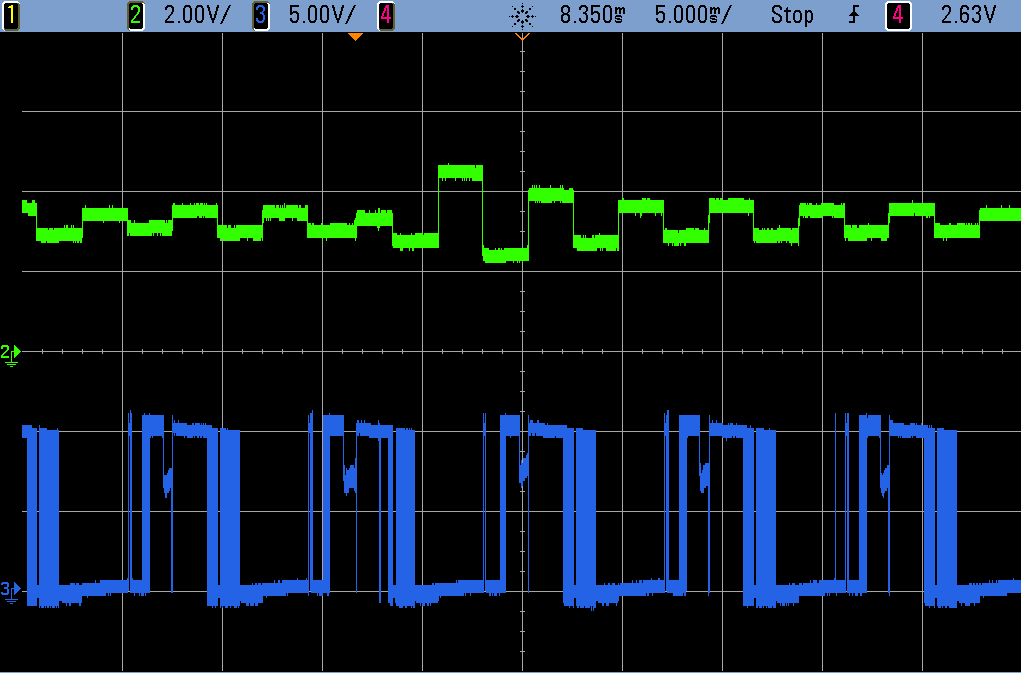 |
AMIS-30543 stepper motor driver SLA output (green) and motor output (blue). |
|---|
It is easy to get started using our Arduino library on GitHub, which provides basic functions for configuring and operating the driver as well as access to many of the advanced features. Please visit the product page for a detailed description, wiring diagrams, the AMIS-30543 datasheet, and more.
Related products

More new distributors
 |
 |
 |
 |
See the full list of over 200 distributors to find one in your area.


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation










