Electronics » Sensors » Accelerometers, Gyros, & Compasses »
MinIMU-9 v6 Gyro, Accelerometer, and Compass (LSM6DSO and LIS3MDL Carrier)

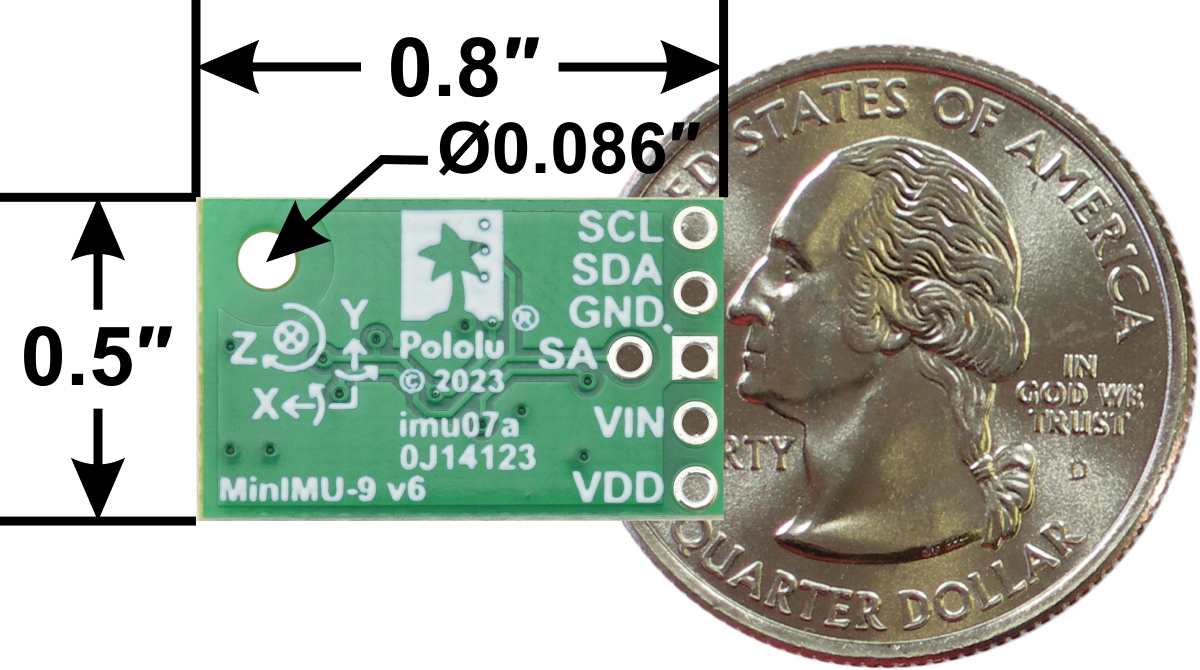
The MinIMU-9 v6 is an inertial measurement unit (IMU) that packs an LSM6DSO 3-axis gyro and 3-axis accelerometer and an LIS3MDL 3-axis magnetometer onto a tiny 0.8″ × 0.5″ board. An I²C interface accesses nine independent rotation, acceleration, and magnetic measurements that can be used to calculate the sensor’s absolute orientation. The MinIMU-9 v6 board includes a voltage regulator and a level-shifting circuit that allow operation from 2.5 to 5.5 V, and the 0.1″ pin spacing makes it easy to use with standard solderless breadboards and 0.1″ perfboards.
 Compare all products in Accelerometers, Gyros, & Compasses or MEMS Sensors.
Compare all products in Accelerometers, Gyros, & Compasses or MEMS Sensors.
| Description | Specs (10) | Pictures (7) | Resources (14) | FAQs (0) | On the blog (0) |
|---|
 |
Overview
The Pololu MinIMU-9 v6 is a compact (0.8″ × 0.5″) board that combines ST’s LSM6DSO 3-axis gyroscope and 3-axis accelerometer and LIS3MDL 3-axis magnetometer to form an inertial measurement unit (IMU); we therefore recommend careful reading of the LSM6DSO datasheet (3MB pdf) and LIS3MDL datasheet (2MB pdf) before using this product. These sensors are great ICs, but their small packages make them difficult for the typical student or hobbyist to use. They also operate at voltages below 3.6 V, which can make interfacing difficult for microcontrollers operating at 5 V. The MinIMU-9 addresses these issues by incorporating additional electronics, including a voltage regulator and a level-shifting circuit, while keeping the overall size as compact as possible. The board ships fully populated with its SMD components, including the LSM6DSO and LIS3MDL, as shown in the product picture.
Compared to the previous MinIMU-9 v5, the v6 version replaces the LSM6DS33 accelerometer/gyro MEMS sensor with the newer LSM6DSO, which offers various improvements like lower noise and a higher maximum output data rate for the gyro. The MinIMU-9 v6 should be able to serve as a drop-in replacement for the MinIMU-9 v5 in many applications; in other cases, software changes might be required.
The MinIMU-9 v6 is also pin-compatible with the AltIMU-10 v6, which offers the same functionality augmented by a digital barometer that can be used to obtain pressure and altitude measurements. The AltIMU includes a second mounting hole and is 0.2″ longer than the MinIMU. Any code written for the MinIMU-9 v6 should also work with the AltIMU-10 v6.
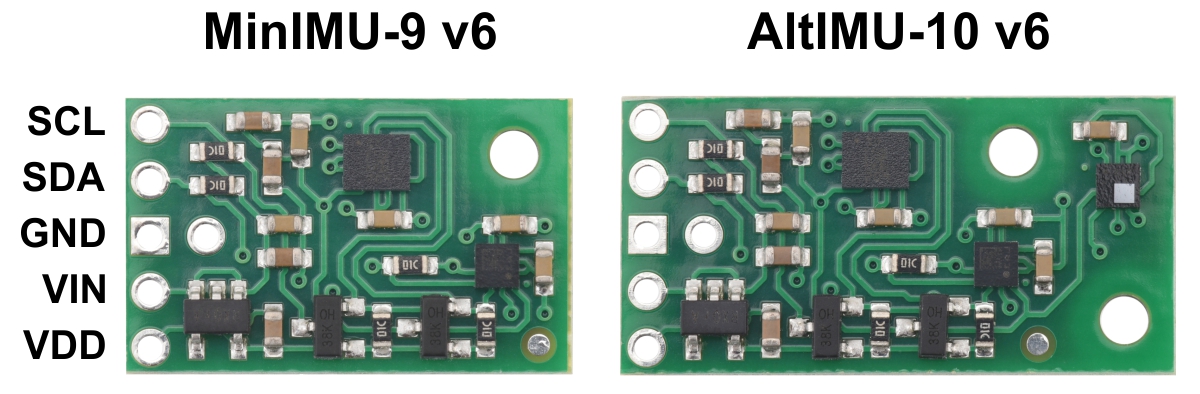 |
Side-by-side comparison of the MinIMU-9 v6 with the AltIMU-10 v6. |
|---|
The LSM6DSO and LIS3MDL have many configurable options, including dynamically selectable sensitivities for the gyro, accelerometer, and magnetometer. Each sensor also has a choice of output data rates. The two ICs can be accessed through a shared I²C/TWI interface, allowing the sensors to be addressed individually via a single clock line and a single data line. Additionally, a slave address configuration pin allows users to change the sensors’ I²C addresses and have two MinIMUs connected on the same I²C bus. (For additional information, see the I²C Communication section below.)
The nine independent rotation, acceleration, and magnetic readings (sometimes called 9DOF) provide all the data needed to make an attitude and heading reference system (AHRS). With an appropriate algorithm, a microcontroller or computer can use the data to calculate the orientation of the MinIMU board. The gyro can be used to very accurately track rotation on a short timescale, while the accelerometer and compass can help compensate for gyro drift over time by providing an absolute frame of reference. The respective axes of the two chips are aligned on the board to facilitate these sensor fusion calculations. (For an example of such a system using an Arduino, see the picture below and the Sample Code section at the bottom of this page.)
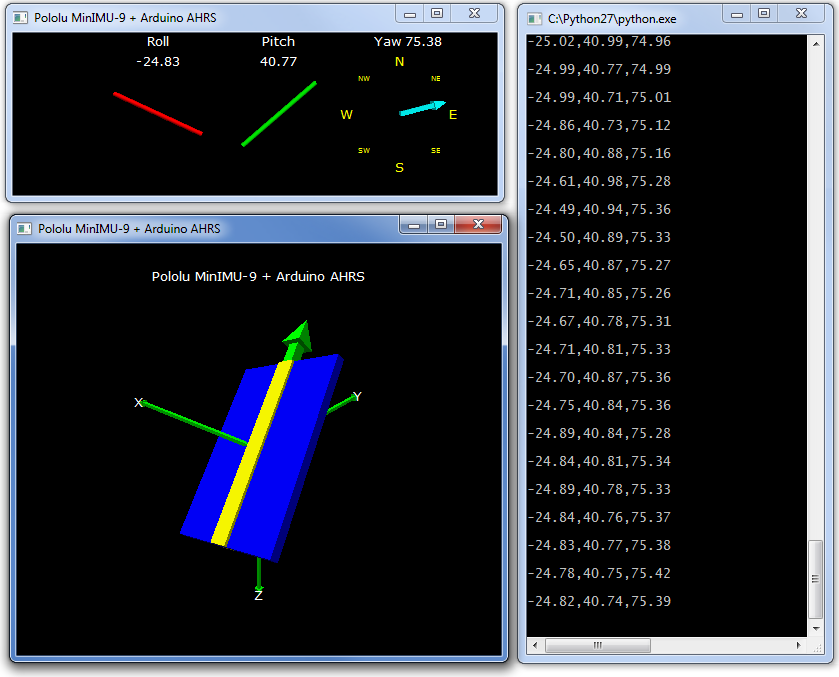 |
Visualization of AHRS orientation calculated from MinIMU-9 readings. |
|---|
The carrier board includes a low-dropout linear voltage regulator that provides the 3.3 V required by the LSM6DSO and LIS3MDL, allowing the module to be powered from a single 2.5 V to 5.5 V supply. The regulator output is available on the VDD pin and can supply almost 150 mA to external devices. The breakout board also includes a circuit that shifts the I²C clock and data lines to the same logic voltage level as the supplied VIN, making it simple to interface the board with 5 V systems. The board’s 0.1″ pin spacing makes it easy to use with standard solderless breadboards and 0.1″ perfboards.
Specifications
- Dimensions: 0.8″ × 0.5″ × 0.1″ (20 mm × 13 mm × 3 mm)
- Weight without header pins: 0.7 g (0.02 oz)
- Operating voltage: 2.5 V to 5.5 V
- Supply current: 4 mA
- Output format (I²C):
- Gyro: one 16-bit reading per axis
- Accelerometer: one 16-bit reading per axis
- Magnetometer: one 16-bit reading per axis
- Sensitivity range:
- Gyro: ±125, ±250, ±500, ±1000, or ±2000°/s
- Accelerometer: ±2, ±4, ±8, or ±16 g
- Magnetometer: ±4, ±8, ±12, or ±16 gauss
Included Components
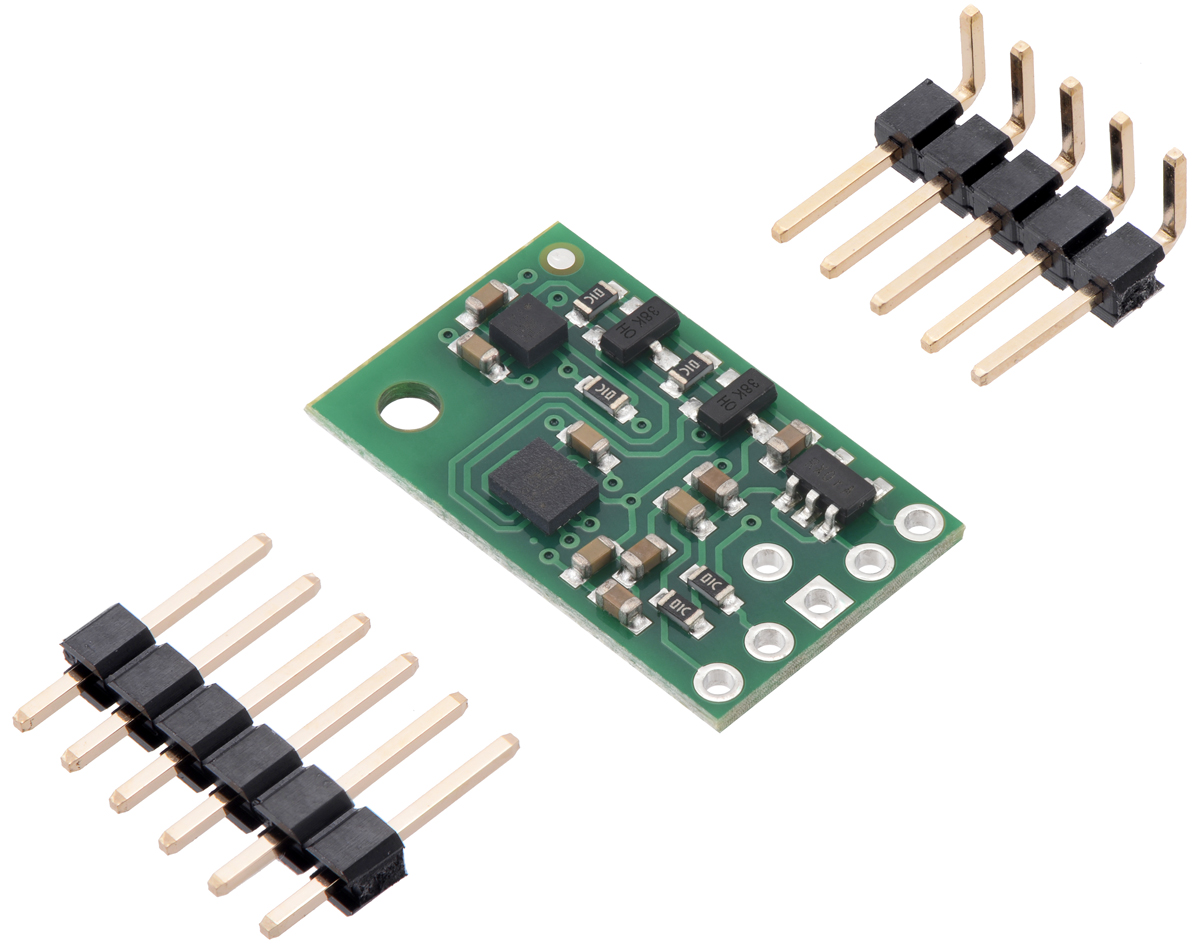
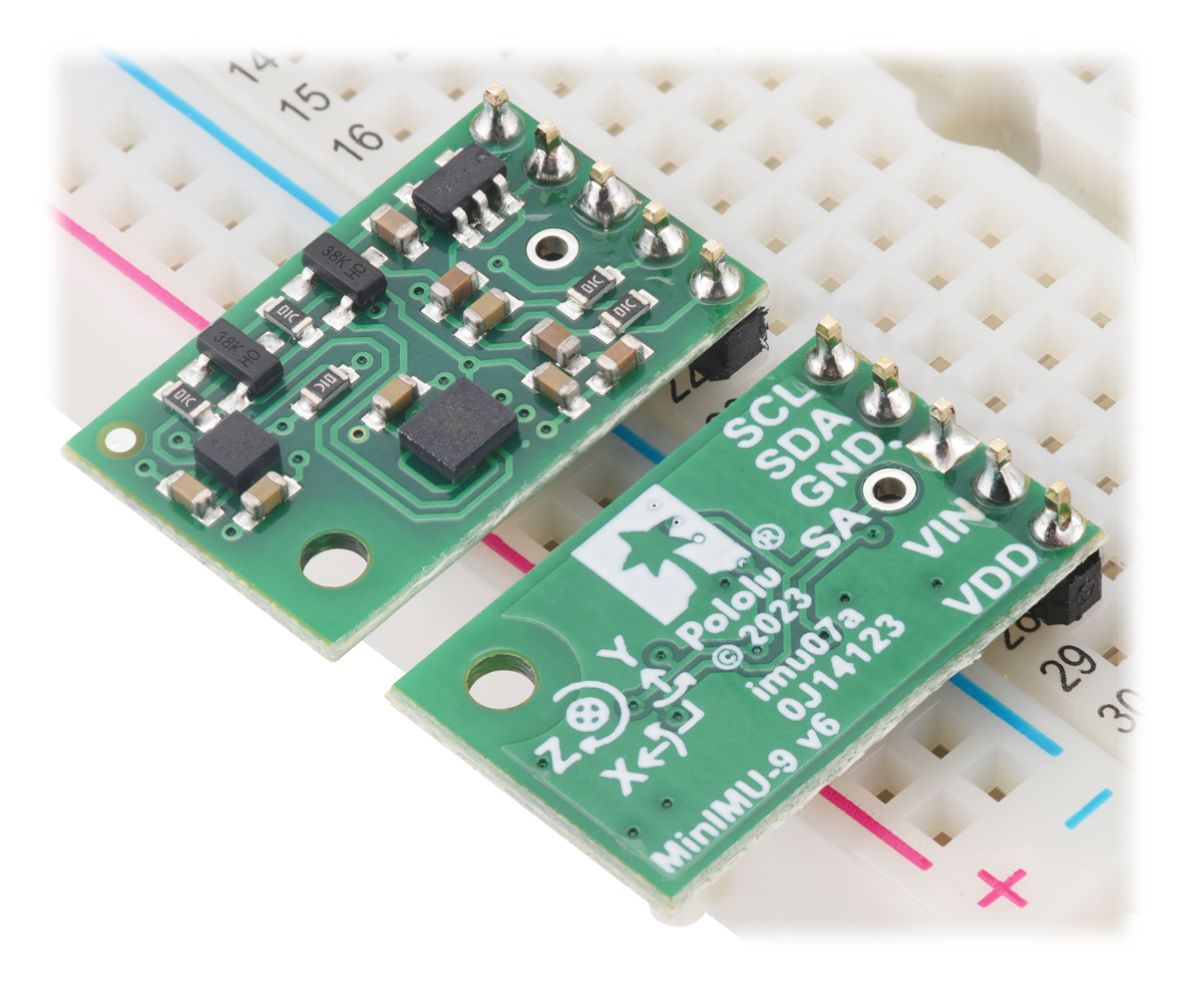
A 1×6 strip of 0.1″ header pins and a 1×5 strip of 0.1″ right-angle header pins are included, as shown in the picture below. You can solder the header strip of your choice to the board for use with custom cables or solderless breadboards or solder wires directly to the board itself for more compact installations. The board features two mounting holes that work with #2 or M2 screws (not included).
 |
Using the MinIMU-9 v6
Connections
A minimum of four connections is necessary to use the MinIMU-9 v6: VIN, GND, SCL, and SDA. VIN should be connected to a 2.5 V to 5.5 V source, GND to 0 volts, and SCL and SDA should be connected to an I²C bus operating at the same logic level as VIN. (Alternatively, if you are using the board with a 3.3 V system, you can leave VIN disconnected and bypass the built-in regulator by connecting 3.3 V directly to VDD.)
|
|
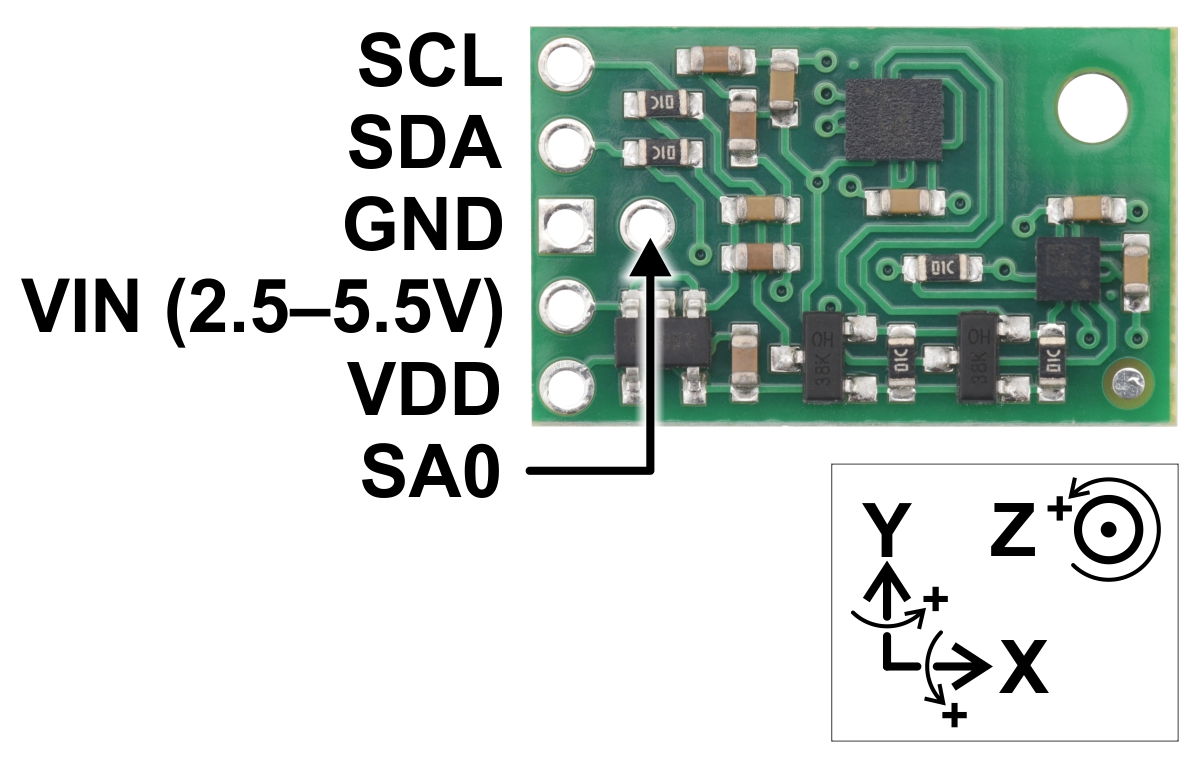
Pinout
| PIN | Description |
|---|---|
| SCL | Level-shifted I²C clock line: HIGH is VIN, LOW is 0 V |
| SDA | Level-shifted I²C data line: HIGH is VIN, LOW is 0 V |
| GND | The ground (0 V) connection for your power supply. Your I²C control source must also share a common ground with this board. |
| VIN | This is the main 2.5 V to 5.5 V power supply connection. The SCL and SDA level shifters pull the I²C bus high bits up to this level. |
| VDD | 3.3 V regulator output or low-voltage logic power supply, depending on VIN. When VIN is supplied and greater than 3.3 V, VDD is a regulated 3.3 V output that can supply up to approximately 150 mA to external components. Alternatively, when interfacing with a 2.5 V to 3.3 V system, VIN can be left disconnected and power can be supplied directly to VDD. Never supply voltage to VDD when VIN is connected, and never supply more than 3.6 V to VDD. |
| SA0 | 3.3V-logic-level input to determine I²C slave addresses of the two ICs (see below). It is pulled high by default through 10 kΩ resistor. This pin is not level-shifted and is not 5V-tolerant. |
The CS, data ready, and interrupt pins of the LSM6DO and LIS3MDL are not accessible on the MinIMU-9 v6. In particular, the absence of the CS pin means that the optional SPI interface of these ICs is not available. If you want these features, consider using our LSM6DSO carrier and LIS3MDL carrier boards.
Schematic Diagram
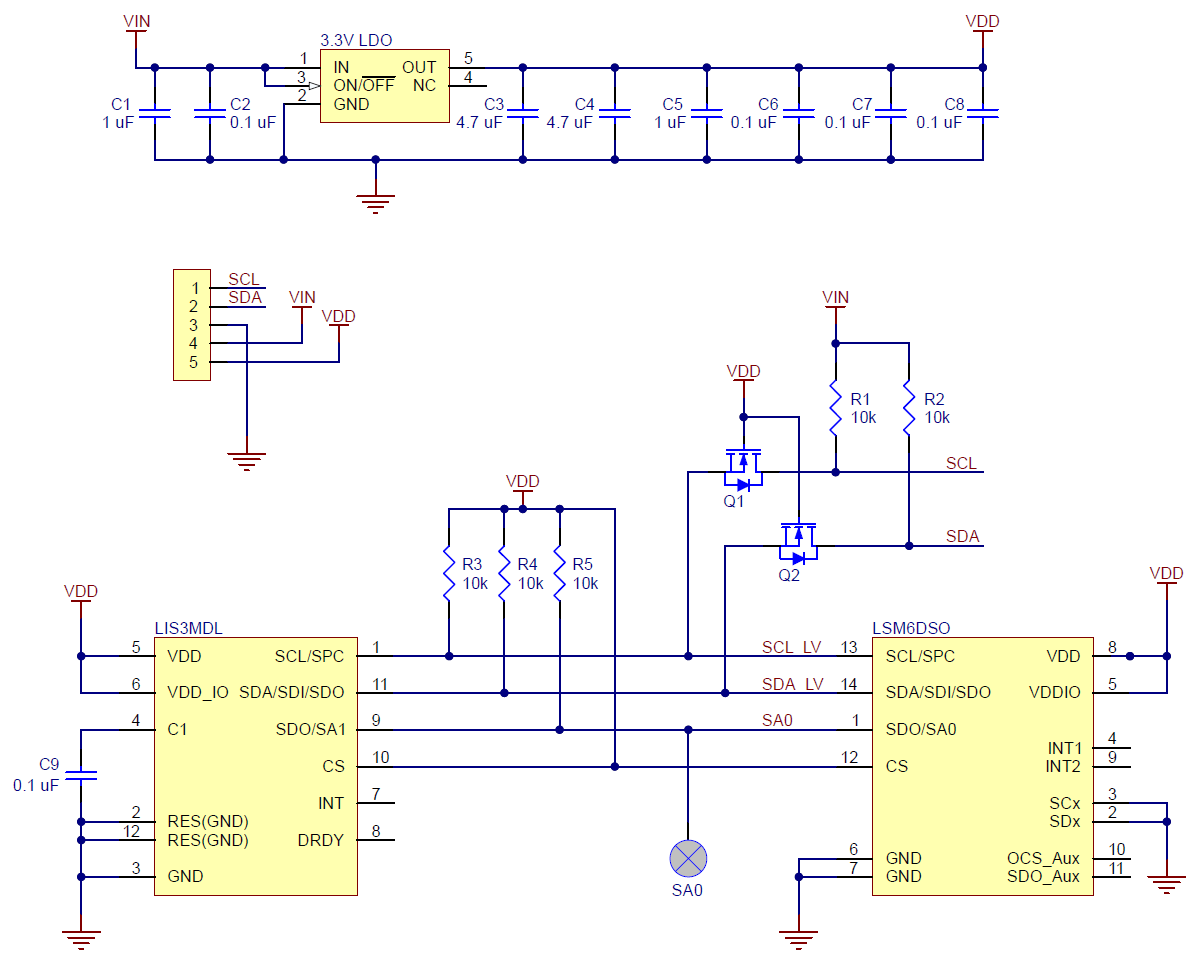 |
The above schematic shows the additional components the carrier board incorporates to make the LSM6DSO and LIS3MDL easier to use, including the voltage regulator that allows the board to be powered from a single 2.5 V to 5.5 V supply and the level-shifter circuit that allows for I²C communication at the same logic voltage level as VIN. This schematic is also available as a downloadable pdf: MinIMU-9 v6 schematic (103k pdf).
I²C Communication
The LSM6DSO’s gyro and accelerometer and the LIS3MDL’s magnetometer can be queried and configured through the I²C bus. Each of the three sensors acts as a slave device on the same I²C bus (i.e. their clock and data lines are tied together to ease communication). Additionally, level shifters on the I²C clock (SCL) and data lines (SDA) enable I²C communication with microcontrollers operating at the same voltage as VIN (2.5 V to 5.5 V). A detailed explanation of the protocols used by each device can be found in the LSM6DSO datasheet (3MB pdf) and the LIS3MDL datasheet (2MB pdf). More detailed information about I²C in general can be found in NXP’s I²C-bus specification (1MB pdf).
The LSM6DSO and LIS3MDL each have separate slave addresses on the I²C bus. The board connects the slave address select pins (SA0 or SA1) of the two ICs together and pulls them both to VDD through a 10 kΩ resistor. You can drive the pin labeled SA0 low to change the slave address. This allows you to have two MinIMUs (or a MinIMU v6 and an AltIMU v6) connected on the same I²C bus. The following table shows the slave addresses of the sensors:
| Sensor | Slave Address (default) | Slave Address (SA0 driven low) |
|---|---|---|
| LSM6DSO (gyro and accelerometer) | 1101011b | 1101010b |
| LIS3MDL (magnetometer) | 0011110b | 0011100b |
Both chips on the MinIMU-9 v6 are compliant with fast mode (400 kHz) I²C standards as well as with the normal mode.
Sample Code
We have written a basic LSM6 Arduino library and LIS3MDL Arduino library that make it easy to interface the MinIMU-9 v6 with an Arduino-compatible board like an A-Star. They also make it simple to configure the sensors and read the raw gyro, accelerometer, and magnetometer data.
For a demonstration of what you can do with this data, you can turn an Arduino connected to a MinIMU-9 v6 into an attitude and heading reference system, or AHRS, with this Arduino program. It uses the data from the MinIMU-9 to calculate estimated roll, pitch, and yaw angles, and you can visualize the output of the AHRS with a 3D test program on your PC (as shown in a screenshot above). This software is based on the work of Jordi Munoz, William Premerlani, Jose Julio, and Doug Weibel.
Protocol Hints
The datasheets provide all the information you need to use the sensors on the MinIMU-9 v6, but picking out the important details can take some time. Here are some pointers for communicating with and configuring the LSM6DSO and LIS3MDL that we hope will get you up and running a little bit faster:
- The gyro, accelerometer, and magnetometer are all in power-down mode by default. You have to turn them on by setting the correct configuration registers.
- You can read or write multiple registers in the LIS3MDL with a single I²C command by asserting the most significant bit of the register address to enable address auto-increment.
- The register address in the LSM6DSO automatically increments during a multiple byte access, allowing you to read or write multiple registers in a single I²C command. Unlike how some other ST sensors work, the auto-increment is enabled by default; you can turn it off with the IF_INC field in the CTRL3_C register.
- In addition to the datasheets, ST provides application notes for the LSM6DSO (2MB pdf) and LIS3MDL (598k pdf) containing additional information and hints about using them.
Product Comparison
We carry several inertial measurement and orientation sensors. The table below compares their capabilities:
| Product Name | Sensors | Estimation | Other | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Gyros (3x) | Accels (3x) | Mag (3x) | Altitude | Roll | Pitch | Yaw | Quaternion | Enclosure | |
| Pololu MinIMU-9 v6 |  |
|
|
||||||
| Pololu AltIMU-10 v6 | |
|
|
|
|||||
| Redshift Labs UM7-LT Orientation Sensor | |
|
|
|
|
|
|
||
| Redshift Labs UM7 Orientation Sensor | |
|
|
|
|
|
|
|
|
People often buy this product together with:
 |
DRV8874 Single Brushed DC Motor Driver Carrier |
Related products
















Coupon Discount
CW24P2862: Get up to 7 of #2862 MinIMU-9 v6 Gyro, Accelerometer, and Compass (LSM6DSO and LIS3MDL Carrier) at $18.95 each. This offer is valid from 03 Dec 2024 to 08 Dec 2024.


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation
