CHR-6d Inertial Measurement Unit

This six-DOF IMU from CH Robotics packs three accelerometer axes, three gyroscope axes, and a STM32F103T8 ARM Cortex processor into a tiny, 0.8" x 0.7" x 0.1" board. The small size and light weight (1.5 g) make the board well suited for unmanned aerial vehicle (UAV) navigation. The integrated 32-bit MPU takes 16-bit readings of the sensors, applies a customizable filter, and reports the results via a TTL serial interface. The Cortex’s programming pins are exposed, and the firmware is open-source.
| Description | Specs (9) | Pictures (3) | Resources (8) | FAQs (0) | On the blog (0) |
|---|
Discontinuation Notice: This module has been replaced by the much more capable CHR-UM6-LT orientation sensor. For an alternative IMU, please consider the Pololu MinIMU-9.
 |
Overview
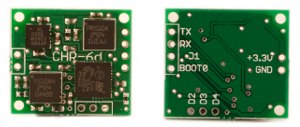
The CH Robotics CHR-6d inertial measurement unit (IMU) uses a 32-bit STM32F103T8 ARM Cortex processor to take 16-bit ADC readings from an ADXL335 three-axis accelerometer, a LP510AL pitch/roll rate gyro, and a LY510ALH yaw rate gyro, providing a full six degree of freedom (6-DOF) measurement solution. The Cortex processor applies a customizable finite impulse response (FIR) digital filter to help reduce noise and makes the results available via a simple TTL-level (3.3V with 5V-tolerant pins) serial interface at baud rates up to 115,200 bps. A USB-to-serial adapter can be used to connect the IMU to a computer running the free IMUkit PC application, which can be used for data visualization and settings configuration.
Update: Units are now being shipped with firmware version 2.0, which adds an on-board Extended Kalman Filter (EKF) for automatic pitch and roll angle estimation.
Note that the board’s pins are spaced 2 mm apart, so the board will not work with standard 0.1" headers or breadboards.
Product Comparison
We carry several inertial measurement and orientation sensors. The table below compares their capabilities:
| Product Name | Sensors | Estimation | Other | |||||
| Gyros (3x) | Accels (3x) | Mag (3x) | Roll | Pitch | Yaw | Quaternion | Enclosure | |
| Pololu MinIMU-9 |  |
|
|
|||||
| CHR-6d IMU * | |
|
|
|
||||
| CHR-UM6-LT Orientation Sensor | |
|
|
|
|
|
|
|
| CHR-UM6 Orientation Sensor | |
|
|
|
|
|
|
|
* Discontinued.
Features
- On-board EKF for pitch and roll angle estimation (firmware version 2.0+ only)
- 3 gyro axes and 3 accelerometer axes
- ±400°/s gyro range
- ±3 g accelerometer range
 |
- Data output rate adjustable from 20 to 300 Hz
- Weighs under 1.5 grams (0.05 oz)
- Small size: 20 x 18 x 3 mm (0.8" x 0.7" x 0.1")
- Configurable windowed Parks-McClellan FIR filter
- TTL UART communication interface (3.3V with 5V-tolerant pins) can stream data or provide data on request
- 16-bit angle outputs provide 0.01° resolution
- Cortex firmware and PC application can be customized
Open Source PC Application and Firmware
Both the PC application for communicating with the CHR-6d and the CHR-6d’s firmware are open source and available for download from the Resources tab. All of the pins needed to reprogram the STM32F103T8 ARM Cortex processor are made available to the user, as are four unused digital I/O pins that can be put to use if the firmware is modified.
Application Examples
The CHR-6d can be used in applications where a compact, 6-DOF IMU is needed, including:
- UAV navigation
- Robotics
- Motion tracking
- Platform stabilization
- Image stabilization
- Supplement to GPS navigation
People often buy this product together with:
 |
Pololu USB-to-Serial Adapter |
 |
0.100" (2.54 mm) Breakaway Male Header: 1×40-Pin, Straight, Black |
 |
0.1" (2.54mm) Crimp Connector Housing: 1x3-Pin 25-Pack |
Related products








Related categories



Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation
