Pololu Blog »
Pololu Blog (Page 88)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Advanced hobby servo control using only a timer and interrupts
In this last article about generating pulses for hobby servo control, I will present what I think is the best solution to controlling many servos or controlling some servos while still leaving enough processing time to do other tasks. It’s not that easy to make this approach work well, so my recommendation in most cases is just to get one of our servo controllers, which use this technique. Continued…
Learning PID values using simulated annealing
This is a video of a robot based on the Pololu 5" robot chassis that automatically improves its PID constants over time.
Featured link: http://www.youtube.com/watch?v=TdquX0lPlYY
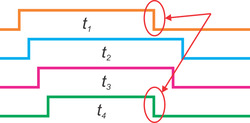
Advanced hobby servo control pulse generation using hardware PWM
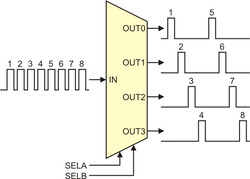
So far, I have discussed a very simple circuit and a very simple microcontroller approach to generate the control pulses needed to control hobby servos. For some applications, those methods are sufficient, but we often want either to control many servos or to do something in addition to controlling servos, and that is when the limitations of the simple approaches and the demands of the servo interface become more apparent. In this post, I will move on to some more sophisticated techniques to generate servo control pulses. Continued…
Motion simulator chairs
Jrk 12v12s are used as part of two-degree-of-freedom motion-simulator chairs (sim chairs) in this project posted to the XSimulator forums. Here is a video of some initial testing using the Jrk Configuration Utilty:
For more details see the forum post.
Related products

Homemade Segway-like personal transport
Our High-Power Motor Drivers are used to drive the motors in this homemade Segway-like personal transport by Hans Michael Steiner.
Related products

Sound-Following 3pi Robot
 |
This sound-following 3pi robot uses three Electret microphone breakout boards and two 74HC4052 multiplexers. Here is a video of the robot in action:
For more details, see this thread on the Pololu forum.
Related products



Waiter Robot
Waiter Robot can make a “Robot Bar” for your next exhibition, show, private event, or sales promotion. They use Pololu 3pi Robots to deliver food and drinks in an remarkable way. Update: The original site for this project is no longer accessible, so we have removed the link.
Related products
BrewMon: Orangutan SVP beer-brewing monitor
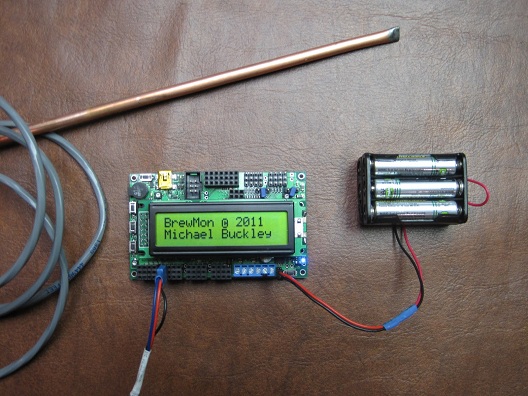 |
A temperature probe, a battery pack, and a Pololu Orangutan SVP-324 Robot Controller are used to make BrewMon, a beer-brewing monitor.
Related products

Micromouse 3pi Robot Video
This video shows a heavily-modified 3pi that uses distance sensors and encoders along with a flood-fill algorithm to find the shortest path through a walled Micromouse maze. The robot is described in more detail in this forum post.
Related products
Simple microcontroller approach to controlling a servo
Today, I want to discuss the microcontroller equivalent of the simple servo control circuit I presented last time. As I mentioned then, the circuit is about as simple as it can be, yet it requires eight components to arrive at a sub-optimal servo control waveform. Some of its deficiencies, such as the slow rise time of the pulses, can be addressed by slightly more advanced circuits that might implement an astable multivibrator using an integrated circuit such as the famous 555 timer. In terms of part count, the 555-based servo controller might be a bit better than the two-transistor approach, but the 555 has many transistors inside it. As long as we are comfortable categorizing a component with many transistors inside it as a single part, we might as well skip the 555 and go straight to a low pin-count microcontroller, which has thousands of transistors inside it and which will allow us to make a far superior, single-component servo controller. Continued…


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation









