Pololu Blog »
Pololu Blog (Page 26)
Welcome to the Pololu Blog, where we provide updates about what we and our customers are doing and thinking about. This blog used to be Pololu president Jan Malášek’s Engage Your Brain blog; you can view just those posts here.
Popular tags: community projects new products raspberry pi arduino more…
Video: Raspberry Pi robot with the Romi chassis
A few weeks ago I posted a tutorial on building a Raspberry Pi robot with the Romi 32U4 Control Board and Romi Chassis. Now we have a short video of the robot in action! For the full tutorial, see my earlier post.
Related products



How to make a Balboa robot balance, part 5: popping up and driving around
This is the fifth and final post in a series about how to make a Balboa 32U4 robot balance. In earlier posts I covered everything you need to get the robot balancing. In this post I will talk about how to get your Balboa to perform some fun and challenging maneuvers.
If you have been following along, you should now have your robot using its inertial sensors, motors, and encoders together to balance in place. Now it’s time to get it moving! Our first challenge will be to get it to “pop up” from a resting position into a balancing position. Then I will show how you can get the Balboa to drive around while balancing. Continued…
Ten-Tec 1254 Receiver Display Upgrade Kit
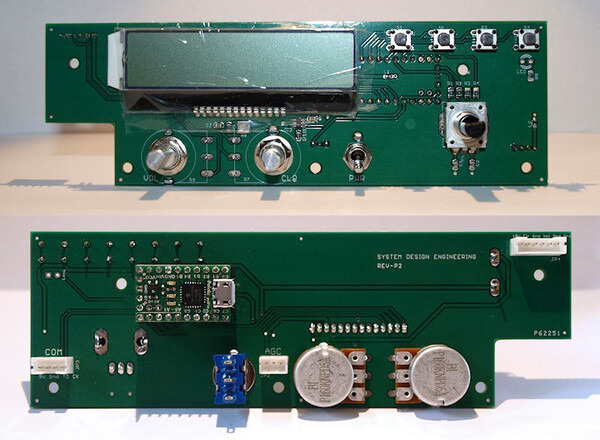 |
Edward Cholakian (call sign KB1OIE) makes and sells a Ten-Tec 1254 Receiver Display Upgrade Kit that is designed to upgrade a Ten-Tec 1254 shortwave radio receiver.
One of the main features of the kit is that it provides a backlit 2×20 character LCD to replace the receiver’s original 5-digit 7-segment display, allowing much more information to be shown. The kit includes a clear plastic window to replace the receiver’s original smoked dark plastic window, and a black plastic display mask. Edward gets both of these pieces made using our custom laser-cutting service.
 |
Two laser-cut pieces, a clear window and black display mask, shown on top of the Ten-Tec 1254 receiver’s original face plate. |
|---|
 |
Ten-Tec 1254 receiver with Edward Cholakian’s display upgrade kit installed. |
|---|
The display/control board in the kit uses the P-Star 25K50 Micro as its processor. Edward, a consulting engineer who designs embedded hardware and firmware, told us that he chose the P-Star because he was already using a Microchip processor similar to the P-Star’s PIC18F25K50 in one of his previous designs, and it was more economical to buy the P-Star than to hand-assemble his own board. He said the P-Star’s cross-platform USB firmware upgrade software was also a plus since his own bootloading software does not support Linux and macOS.
The kit comes with software for Windows that can control the receiver over USB. The software provides a graphical user interface and uses WinUSB to talk to the P-Star’s native USB interface.
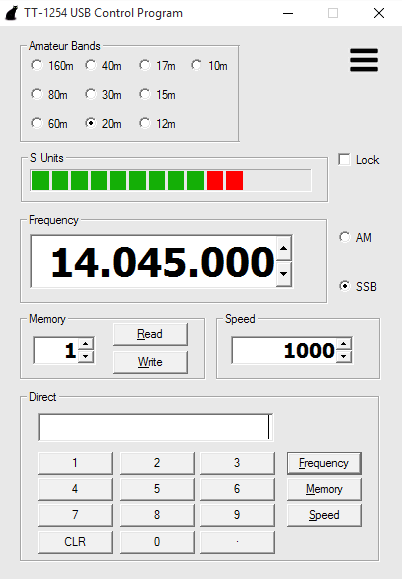 |
USB control program for the Ten-Tec 1254 Receiver Display Upgrade Kit |
|---|
For more information, see the Ten-Tec 1254 Receiver Display Upgrade Kit page.
Related products


RoboClaw 2x60A Motor Controller (V6)
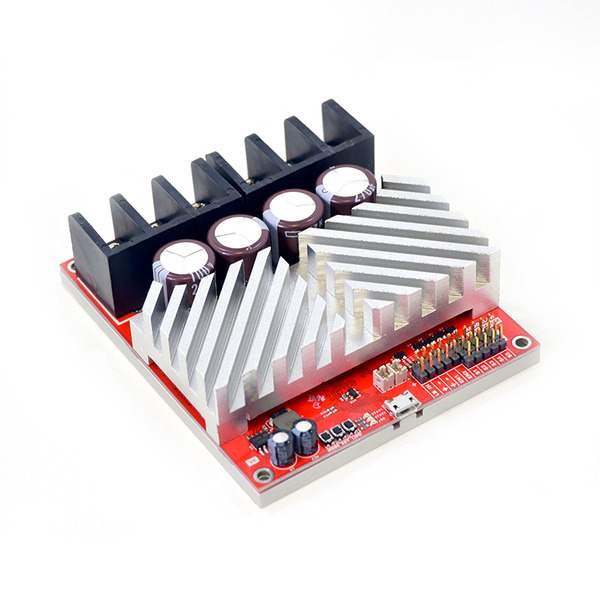 |
The RoboClaw 2x60A motor controller (V5) we’ve been carrying has been replaced by the new RoboClaw 2x60A Motor Controller (V6). This powerful motor controller can drive two brushed DC motors with 60 A continuously at voltages from 6 V to 34 V, and it allows for peak currents up to 120 A. Version six adds a protective aluminum plate to the board bottom and ports for connecting optional cooling fans that are controlled based on the board temperature.
 |
RoboClaw 2×60A Motor Controller (V6) and RoboClaw 2×60AHV Motor Controller (60VDC), bottom view. |
|---|
The RoboClaw motor controllers from Ion Motion Control can control a pair of brushed DC motors using USB serial, TTL serial, RC, or analog inputs. Integrated dual quadrature decoders make it easy to create a closed-loop speed control system, or analog feedback can be used for position control.
For more information, see the product page.
Related products

Wall Power Adapter: 5.25VDC, 2.4A, 20AWG MicroUSB Cable
 |
We’ve added this Micro-USB wall adapter to our catalog. It can supply up to 2.4 A at 5.25 VDC (the USB specification’s maximum bus voltage), allowing for voltage drop due to power draw when powering 5 V electronics. It features a 1.5 m to 1.8 m (5 ft to 6 ft) DC power cord with 20 AWG wires that is terminated by a USB Micro-B connector, which makes it great for powering devices like a Raspberry Pi (especially newer Raspberry Pi models, like the Pi 3, which can draw a lot of current!).
 |
Raspberry Pi connected to a Wall Power Adapter: 5.25VDC, 2.5A, 20AWG MicroUSB Cable. |
|---|
For more details, see the product page.


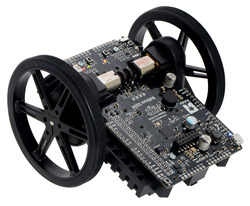
Building a Raspberry Pi robot with the Romi chassis

This tutorial shows how to build a basic Raspberry Pi robot with the Romi chassis and the Romi 32U4 Control Board, our Arduino-compatible microcontroller board designed specifically for the Romi. With this setup, the powerful Raspberry Pi can take care of high-level tasks like motion planning, video processing, and network communication, while the Romi 32U4 Control Board takes care of low-level tasks that the Pi is incapable of, such as motor control and sensing. Continued…
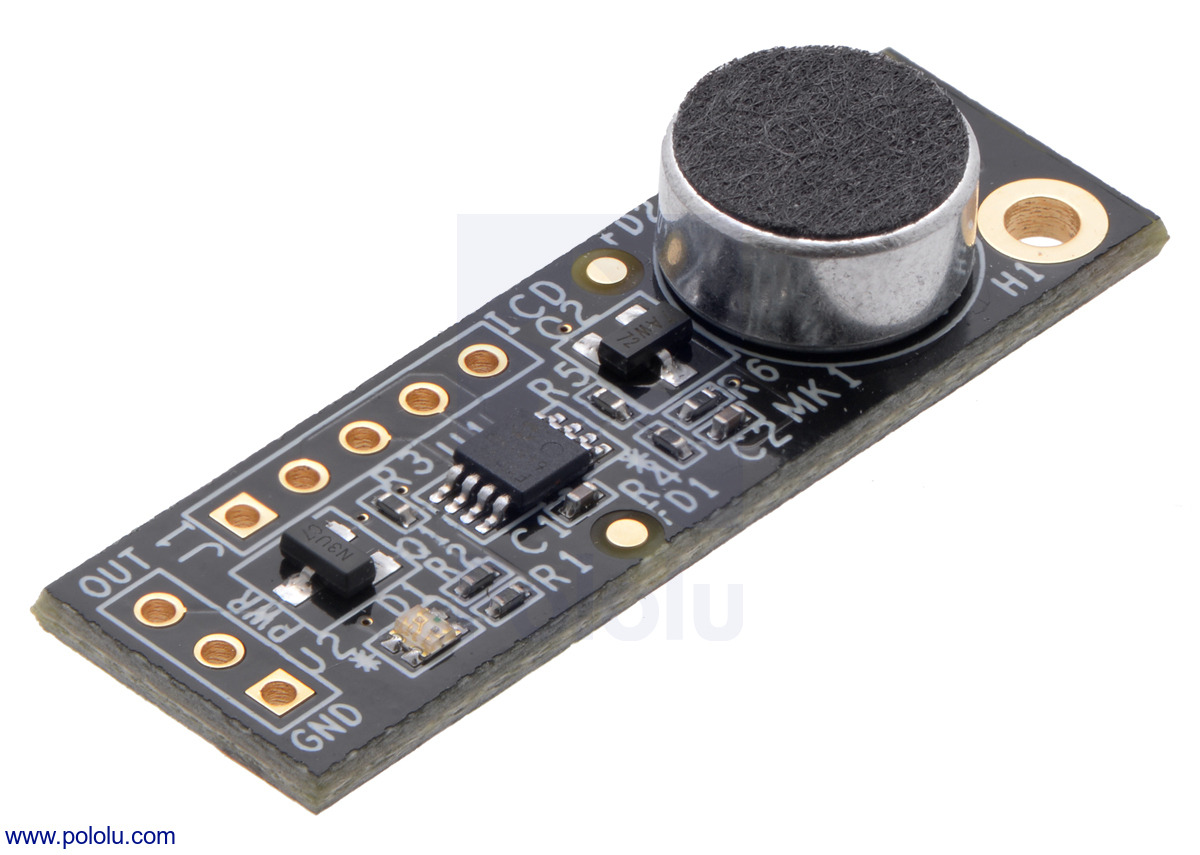
Verbal Machines VM-CLAP1 Hand Clap Sensor
Don’t hold your applause: we are now offering the Verbal Machines VM-CLAP1 Hand Clap Sensor! This board is a low-power, microprocessor-based audio sensor that can detect hand claps or finger snaps while ignoring background noises such as human speech or music. It operates from 2.5 V to 5.5 V and offers a simple interface: when a clap or snap is detected, the output pin goes low for 40 ms, and the integrated blue LED lights up.
 |
Related products

The Rebel WIP from UNLV
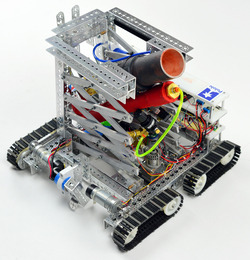
It has been over a year since my last/first blog post about my mini sumo robot. Since then, I have been busy studying to earn a mechanical engineering degree at the University of Nevada, Las Vegas, working at Pololu, and, of course, building cool robots. Recently, I have been working as part of a UNLV team, Rebel Robotics, to build a robot to compete in an intercollegiate competition organized by the American Society of Mechanical Engineers (ASME) called the Student Design Competition. My team’s robot, the Rebel WIP (work in progress), competed against teams from colleges across the western half of the United Sates in the Student Design Competition at an engineering festival hosted by UNLV and ASME called E-Fest West. Continued…
Balancing robot with stepper motors
One of our customers built this six-foot tall balancing robot. The main microcontroller is a Teensy 3.6, and the stepper motors are driven by ST-M5045 drivers. For its drive train it uses two 3 A stepper motors connected to Pololu 90 mm wheels via Pololu universal aluminum mounting hubs.
Here’s what they have to say about using stepper motors:
I used stepper motors to take advantage of high torque at low RPM and zero backlash. This allows very steady stand-still performance. But dealing with the stepper-induced mechanical vibration was an issue. This was mostly solved with analog filters on the IMU and with an Extended Kalman Filter in software.
Additional description and pictures are available on the project page.
Related products


How to make a Balboa robot balance, part 4: a balancing algorithm
This is the fourth post in a series about how to make a Balboa 32U4 robot balance. In earlier posts I covered the basic sensors and mechanical parts used for balancing; in this post I will show you how to put everything together to make the robot actually balance.
From earlier posts we have obtained six basic variables for use in balancing: Continued…


Home | Forum | Blog | Support | Ordering Information | Wish Lists | Distributors | BIG Order Form | About | Contact
© 2001–2024 Pololu Corporation









