Pololu Blog »
Posts tagged “tic”
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
New product: Tic 36v4 USB Multi-Interface High-Power Stepper Motor Controller
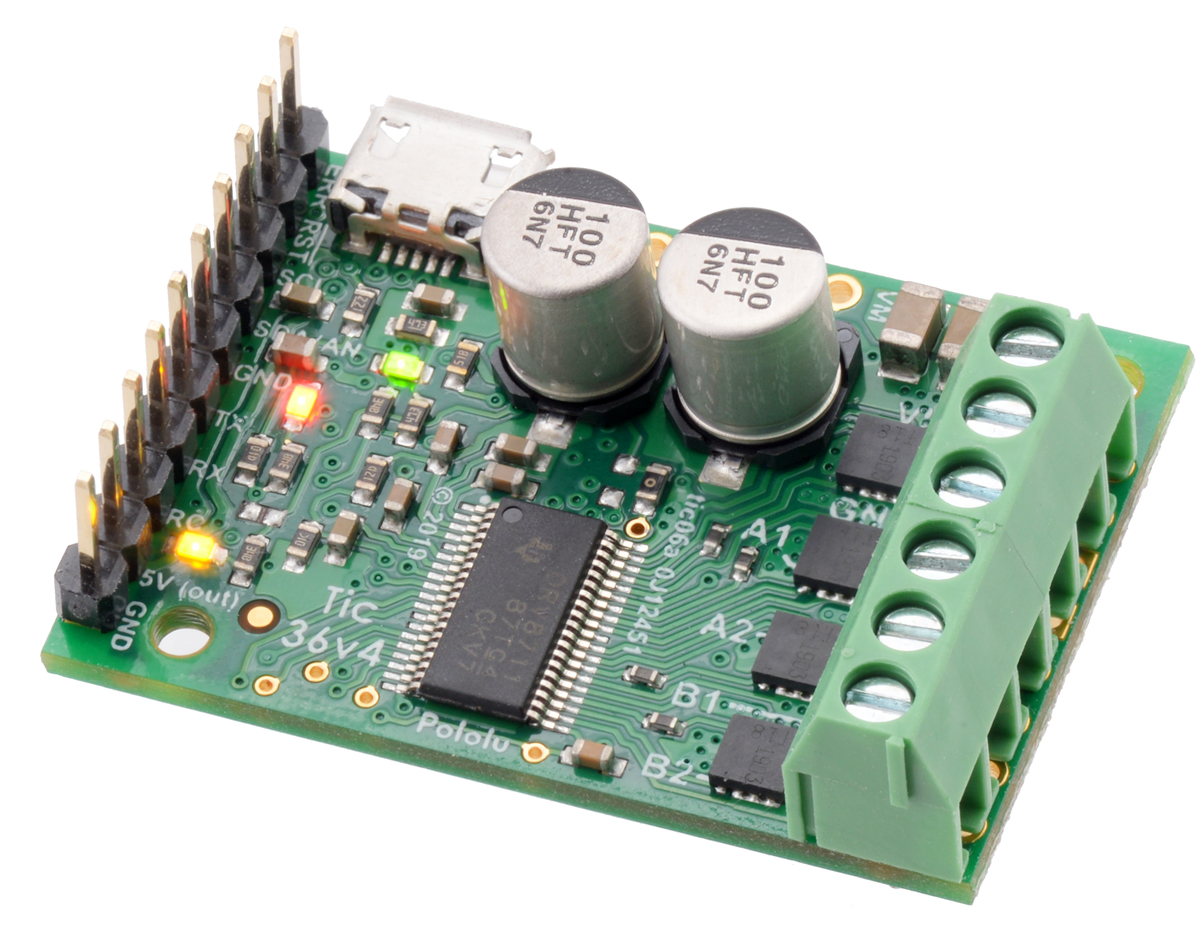 |
I am pleased to announce the release of the Tic 36v4 USB Multi-Interface High-Power Stepper Motor Controller, the fifth model in our line of Tic Stepper Motor Controllers. The Tic 36v4 features a discrete MOSFET stepper motor driver that can deliver up to approximately 4 A per phase, without a heat sink or forced air flow, over a broad 8 V to 50 V operating range. With the ability to provide more than twice as much current as any of our previous stepper motor controllers, this is our highest-power Tic yet, and the first that can drive the most demanding stepper motors we carry (#1474 and #1478) with their full rated current (2.8 A).
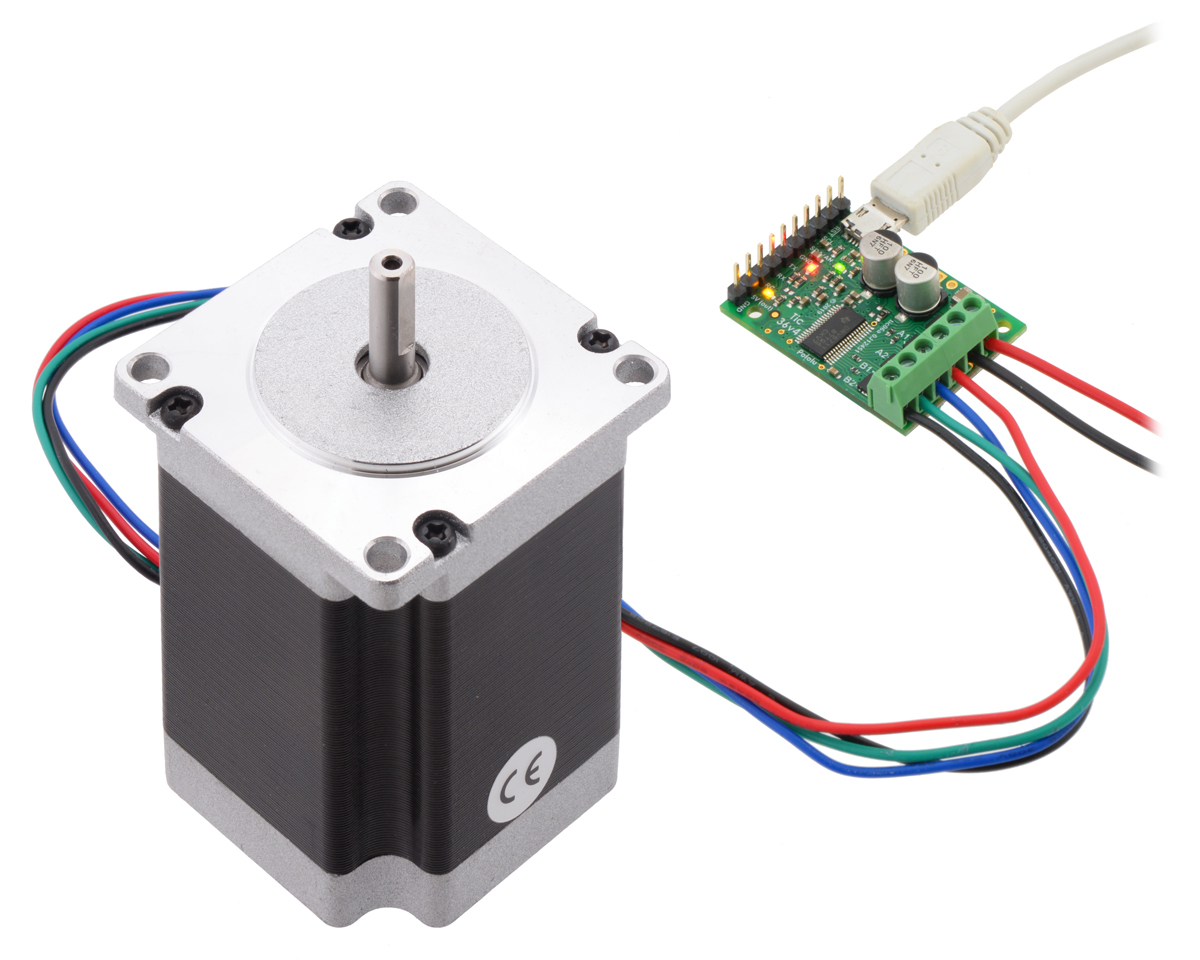 |
Tic 36v4 USB Multi-Interface High-Power Stepper Motor Controller controlling a #1478 stepper motor from USB. |
|---|
The Tic 36v4 supports microstepping resolutions down 1/256 step, which is 8 times smaller than any previous Tic model. These new, finer microstep resolutions make it increasingly important to be able to take steps at a high speed since with microsteps that small, it takes up to 51,200 of them to complete one revolution on standard stepper motors with 200 full steps per revolution. The Tic firmware takes care of that for you: it is designed to be able to produce up to 50,000 steps per second, meaning that you can get 58 RPM out of most of our stepper motors even when using 1/256 step mode. Every power of two step mode between full stepping and 1/256 is supported, allowing you to choose the right trade-off between speed and resolution.
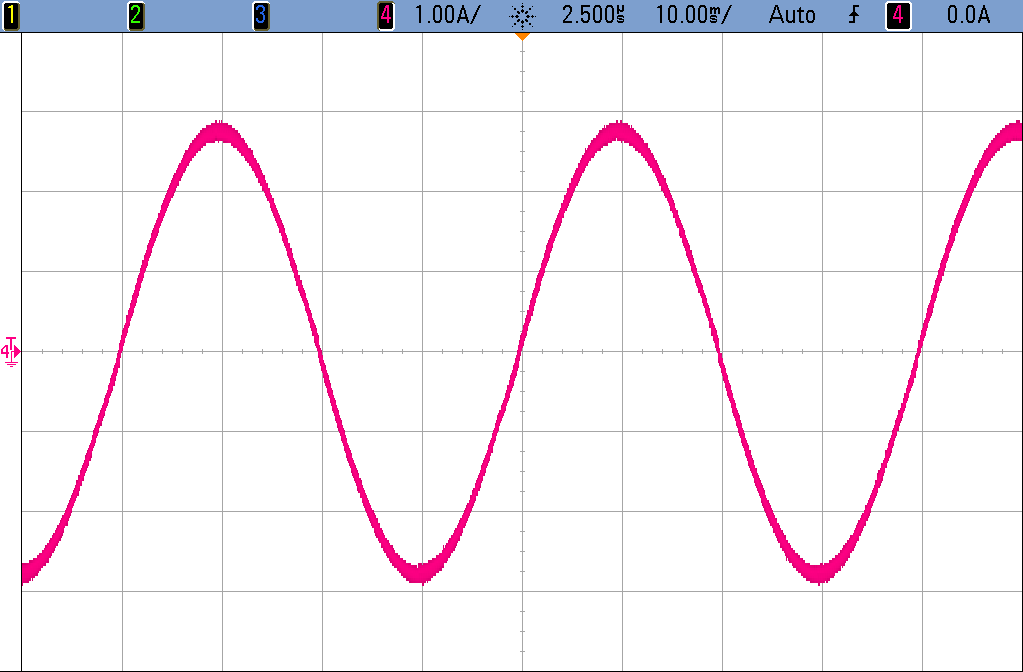 |
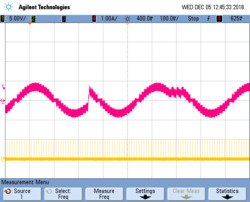
An oscilloscope capture showing the current through one coil of a stepper motor as the Tic 36v4 takes 25600 microsteps per second in 1/256 step mode. |
|---|
By default, the Tic 36v4 uses an automatic mixed decay mode for current regulation. In this mode, it dynamically selects between fast or slow decay based on the actual coil current, allowing it to achieve extremely smooth stepping in most applications without a lot of manual tuning—especially at high microstepping resolutions. (Isn’t that a nice sine wave in the picture above?)
However, if you want more control, this Tic also gives you the option to select a fixed decay mode and adjust several timing parameters to fine-tune the current decay behavior. This can be easily done with the Tic’s free graphical configuration software.
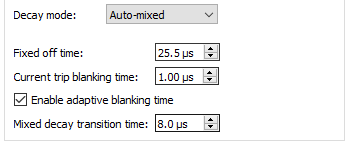 |
The decay mode settings for the Tic 36v4 in the Tic Control Center software. |
|---|
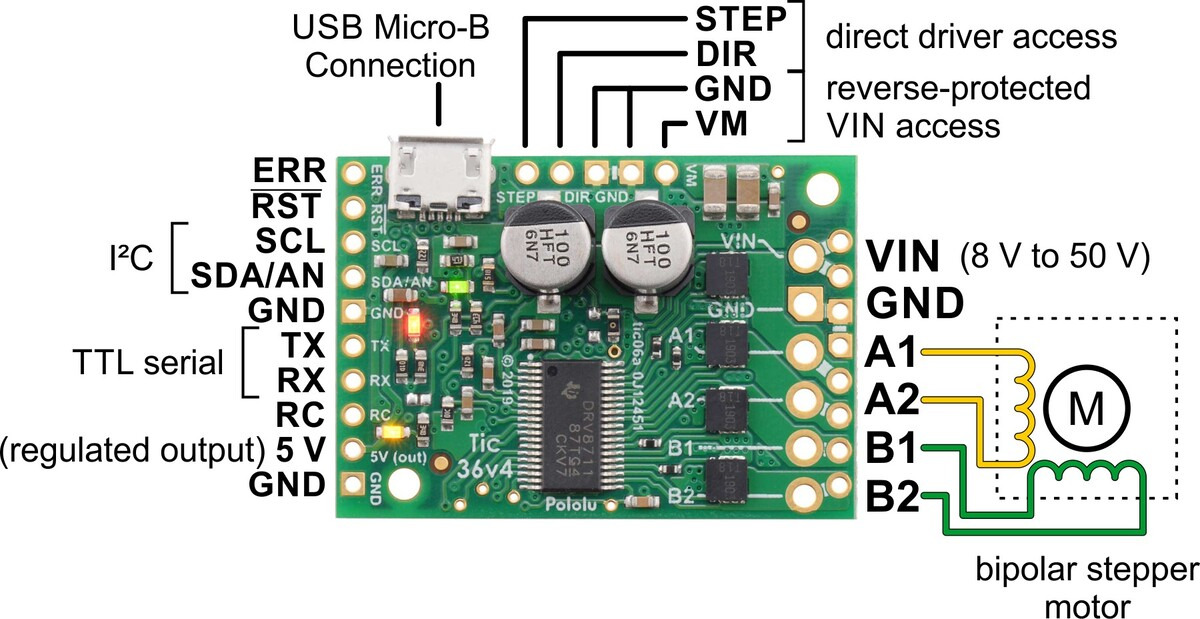
Like the other members of the Tic family, the Tic 36v4 makes basic speed or position control of a stepper motor easy, with lots of configurable parameters (e.g. max speed and acceleration) and support for six high-level control interfaces:
- USB for direct connection to a computer
- TTL serial operating at 5 V for use with a microcontroller
- I²C for use with a microcontroller
- RC hobby servo pulses for use in an RC system
- Analog voltage for use with a potentiometer or analog joystick
- Quadrature encoder input for use with a rotary encoder dial, allowing full rotation without limits (not for position feedback)
 |
This video gives a brief demonstration of these interfaces in action:
The Tic 36v4 is available with connectors soldered in or without connectors soldered in. If you do not need the high-level interfaces provided by the Tic, we also offer the Pololu High-Power Stepper Motor Driver 36v4.
Here is a handy comparison chart with all five Tic stepper motor controllers:
 Tic T500 |
 Tic T834 |
 Tic T825 |
 Tic T249 |
 Tic 36v4 |
|
|---|---|---|---|---|---|
| Operating voltage range: | 4.5 V to 35 V(1) | 2.5 V to 10.8 V | 8.5 V to 45 V(1) | 10 V to 47 V(1) | 8 V to 50 V(1) |
| Max continuous current per phase (no additional cooling): |
1.5 A | 1.5 A | 1.5 A | 1.8 A | 4 A |
| Peak current per phase (additional cooling required): |
2.5 A | 2 A | 2.5 A | 4.5 A | 6 A |
| Microstep resolutions: | full half 1/4 1/8 |
full half 1/4 1/8 1/16 1/32 |
full half 1/4 1/8 1/16 1/32 |
full half 1/4 1/8 1/16 1/32 |
full half 1/4 1/8 1/16 1/32 1/64 1/128 1/256 |
| Automatic decay selection: |  |
|
|
||
| Automatic gain control (AGC): | |
||||
| Driver IC: | MP6500 | DRV8834 | DRV8825 | TB67S249FTG | discrete MOSFETs |
| Price (connectors not soldered): | $29.95 | $39.95 | $39.95 | $49.95 | $59.95 |
| Price (connectors soldered): | $31.95 | $41.95 | $41.95 | $51.95 | $61.95 |
1 See product pages and user’s guide for operating voltage limitations.
Introductory special
As usual, we are offering an extra introductory special discount on the Tic 36v4, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code TIC36V4INTRO can get up to five units for just $24.95! And we’ll even cover the shipping in the US!

Related products


Ham radio antenna rotor control using a Tic Stepper Motor Controller
Pablo Lewin wanted a way to adjust the antenna for his Ham radio remotely, but was told his antenna controller was too old to upgrade for remote operation. That didn’t deter him though! He got creative and came up with a solution by connecting a stepper motor to his antenna controller and then using one of our Tic Stepper Motor Controllers. Now he can access the computer the Tic is connected to remotely and control the antenna’s position through the Tic’s software. Check out the video below to see his setup:
Here’s the video Pablo recommends at the beginning of his explanation to get up and running with your own Tic Stepper Motor Controller:
Related products




Firmware update for Tic Stepper Motor Controllers, with new features including limit switches and homing
 |
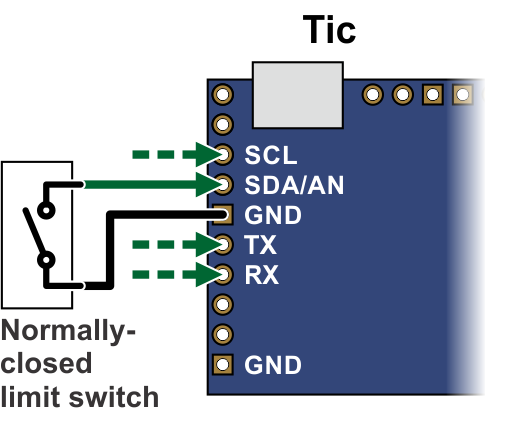 |
Connecting a limit switch to the Tic (SCL, SDA, TX, and RX pins). |
|---|
To go along with last week’s release of the Tic T249, we have also released a new version of the Tic firmware (version 1.06) for all Tic stepper motor controllers that adds several new features.
By popular demand, this new firmware version adds support for limit switches: any of the Tic control pins (SCL, SDA, TX, RX, or RC) can be configured as a digital input for a forward or reverse limit switch. When the limit switch is active, the Tic abruptly shuts down any movement in the specified direction, but allows the stepper motor to move in the other direction. You can use limit switches to help prevent your system from leaving its desired range of motion.
If you configure a limit switch, you can use the Tic’s new homing procedure. The new “Go home” command, which is available over serial, I²C, and USB, starts the homing procedure. The Tic will move in the direction specified by the command until it hits a limit switch for that direction. Then it will change directions, move until the limit switch deactivates, and set its current position to 0. The stepping speeds used by the Tic during the homing procedure are configurable.
You can also use the homing feature automatically, without sending a command. If automatic homing is enabled, the Tic performs the homing procedure whenever it is being commanded to go to a specific position but it is uncertain of its current position (e.g. immediately after motor power is applied). This feature can be handy if you are controlling the position of your stepper motor using an RC, analog, or quadrature encoder signal.
We have added a new section to the Tic user’s guide with detailed instructions for setting up limit switches and homing.
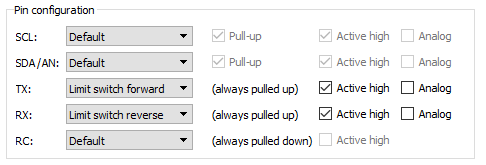 |
Example pin configuration for a Tic with limit switches. |
|---|
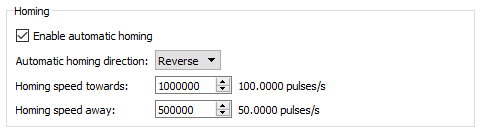 |
New homing settings added in Tic firmware version 1.06. |
|---|
The new firmware version also adds several features to the Tic’s TTL serial interface that make it more usable in systems with large numbers of Tics and in half-duplex serial busses. Specifically, it adds support for an alternative device number so any Tic can optionally be addressed by two different device numbers, and it adds an option to enable 14-bit device numbers so you can have more than 128 devices on a serial bus. The new firmware version also has an option to encode its serial responses using only bytes between 0 and 127, which can be useful in setups where the serial response from one Tic will be seen by other Tic devices, and you don’t want it to be misinterpreted as a command. We also implemented several changes to make the Tic less susceptible to noise on the serial lines, and you can now enable CRC bytes for serial responses sent by the Tic so that you can confirm the data you received matches what the Tic sent.
The Tic T249 was released with the latest firmware, so it has all of these new features, and we will be upgrading our existing Tics to this firmware version as we manufacture more. To gain access to these new features on your existing Tic controllers, you can download the latest configuration software and upgrade your device’s firmware to version 1.06. For more information, see the firmware upgrade instructions in the Tic user’s guide.
Related products







Macro photography using Tic stepper motor controllers
|
|

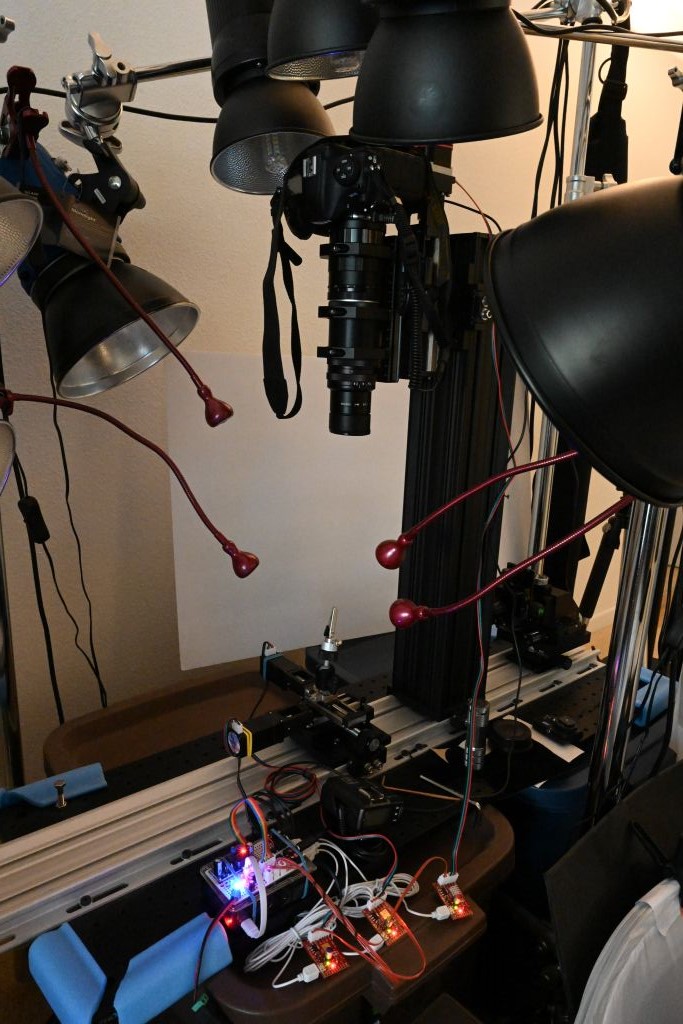
Forum member Mike is using our Tic stepper motor controllers in his automated stack & stitch image acquisition systems, which he has been using to get extremely high resolution images of various integrated circuits. Each system uses linear rails and stepper motors to properly align the camera/lens and the object to be photographed. Two stepper motors position the subject and a third adjusts how close the camera is to the subject. A Tic T500 controls each stepper motor and each Tic connects to a USB port on a Raspberry Pi 3B or Raspberry Pi 3B+, which acts as the main computer. Afterward, Mike stacks the images with Zerene Stacker and stitches them together with Photoshop. Some of his image sessions capture as many as 6000 individual images that are used to produce a single 300 megapixel image!
 |
Zooming in on a stack & stitch test image. |
|---|
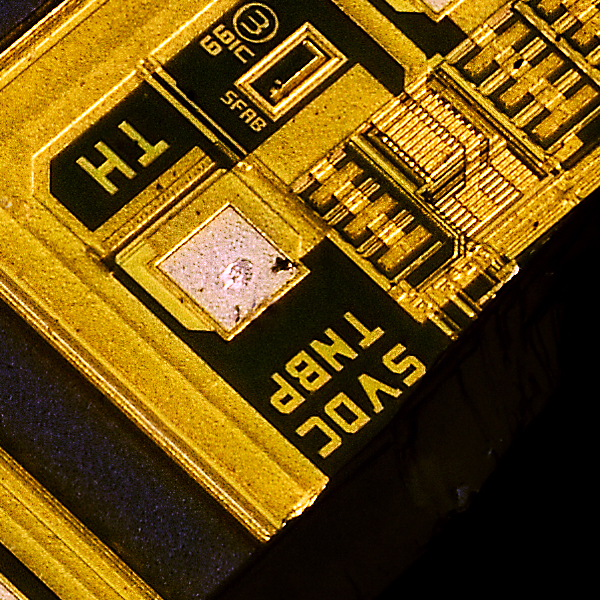 |
A close-up view of a stack & stitch test image. |
|---|
You can find more information about Mike’s stack & stitch image acquisition systems (like what specific mechanical hardware he is using) in this forum post. Also, to see and/or download a set of high resolution pictures taken with those setups, follow this link.

New product: Tic T249 USB Multi-Interface Stepper Motor Controller

I am excited to announce the release of the Tic T249 USB Multi-Interface Stepper Motor Controller, the fourth model in our line of Tic Stepper Motor Controllers. The Tic T249, which is based on the TB67S249FTG IC from Toshiba, features a broad 10 V to 47 V operating range and can deliver up to approximately 1.8 A per phase without a heat sink or forced air flow, making it our highest-power Tic yet. In addition to the array of high-level features offered by the other members of our Tic family, the Tic T249 offers access to several innovative features of the TB67S249FTG driver. Continued…
New Tic T500 revision to address problem with missed steps
One of the fun things you learn as an engineer is that physically laying out a circuit requires a lot more than simply confirming it matches the schematic. In practice, there are many more things to think about, and if you’ve seen datasheets with layout guidelines or recommendations, you’re probably aware of some of them. (Thermal considerations, adequate decoupling, minimizing parasitic inductance and capacitance…) What’s more, these considerations are often in conflict (e.g. is it better to have the decoupling capacitor closer to the IC or to have a wider trace for that high-current path?), and trouble can arise if you don’t correctly assess their relative importance. That is what happened to us with our Tic T500 stepper motor controller, where the location of a specific decoupling capacitor ended up being far more significant than we had anticipated. Continued…
PyTic - Python interface for Pololu Tic Stepper Motor Controllers
 |
Customer Daniel Castelli of the Allen Institute has released a Python package for interfacing with our Tic Stepper Motor Controllers. Currently, he only supports 64-bit Windows, but the source code is available and should be straightforward to extend to other operating systems. Here is example code using PyTic to control a stepper motor:
import pytic
from time import sleep
# - Initialization -------------------------------------------
tic = pytic.PyTic()
# Connect to first available Tic Device serial number over USB
serial_nums = tic.list_connected_device_serial_numbers()
tic.connect_to_serial_number(serial_nums[0])
# Load configuration file and apply settings
tic.settings.load_config('path\\to\\config.yml')
tic.settings.apply()
# - Motion Command Sequence ----------------------------------
# Zero current motor position
tic.halt_and_set_position(0)
# Energize Motor
tic.energize()
tic.exit_safe_start()
# Move to listed positions
positions = [1000, 2000, 3000, 0]
for p in positions:
tic.set_target_position(p)
while tic.variables.current_position != tic.variables.target_position:
sleep(0.1)
# De-energize motor and get error status
tic.enter_safe_start()
tic.deenergize()
print(tic.variables.error_status)
The code and documentation for this package are available on GitHub.
Related products
Video: Getting Started with the Tic Stepper Motor Controllers
As I showed in my last post a few weeks ago, our Tic stepper motor controllers offer six different control interfaces so you can add stepper motors to a variety of projects. Getting started with the Tics is easy. This new video tutorial steps (see what I did there?) you through getting your stepper motor running with our Tic controllers:
As I was making this video, I realized one of the coolest things about the Tic is how quickly you can work out the capabilities of your stepper motor. Even if you’re comfortable using one of our stepper motor drivers along with a microcontroller, using the Tics makes adjusting settings like current limits, step rates, speed, and acceleration as quick as a click of the button, and you can control your motor directly from the software to make sure it’s behaving how you would like. So you might want to keep an extra Tic around for that purpose, just as a stepper motor tester.
Right now you can still purchase our newest Tic at a special introductory price of just $15.53 using the coupon code T500INTRO! (Click to add the coupon code to your cart.) We also cover shipping in the US! Note that this introductory offer applies only to the units without connectors soldered in.
Related products
New product: Tic T500 USB Multi-Interface Stepper Motor Controller
Our Tic stepper motor controllers are pretty awesome, and the new Tic T500 we released today should make stepper motors even more accessible for your next project. This latest version features a broad 4.5 V to 35 V operating range that covers everything from small 2-cell lithium battery packs up to 24 V batteries or power supplies while costing just $20 in single-piece quantities. This video gives you a quick overview of what the Tic stepper motor controllers offer:
The Tics make basic speed or position control of a stepper motor easy, with support for six high-level control interfaces:
- USB for direct connection to a computer
- TTL serial operating at 5 V for use with a microcontroller
- I²C for use with a microcontroller
- RC hobby servo pulses for use in an RC system
- Analog voltage for use with a potentiometer or analog joystick
- Quadrature encoder input for use with a rotary encoder dial, allowing full rotation without limits (not for position feedback)
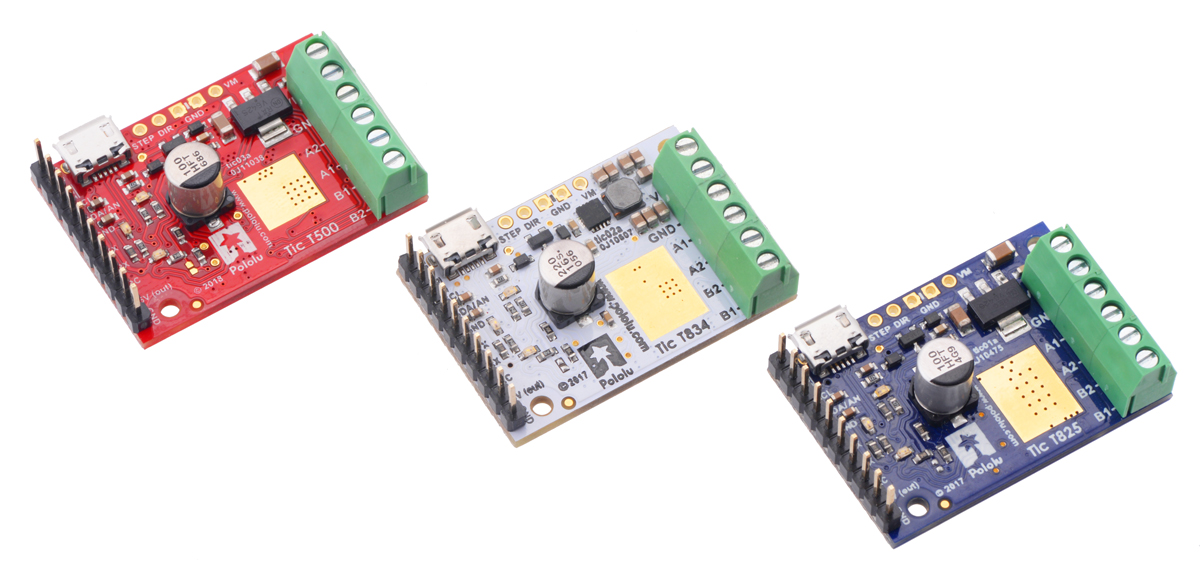
The Tic T500 is available with connectors soldered in or without connectors soldered in. Here is a handy comparison chart with all three Tic stepper motor controllers:
Tic T500 |
Tic T834 |
Tic T825 |
|
|---|---|---|---|
| Operating voltage range: | 4.5 V to 35 V(1) | 2.5 V to 10.8 V | 8.5 V to 45 V(1) |
| Max current per phase (no additional cooling): |
1.5 A | 1.5 A | 1.5 A |
| Microstep resolutions: | full half 1/4 1/8 |
full half 1/4 1/8 1/16 1/32 |
full half 1/4 1/8 1/16 1/32 |
| Automatic decay selection: | |
||
| Price (connectors not soldered): | $29.95 | $39.95 | $39.95 |
| Price (connectors soldered): | $31.95 | $41.95 | $41.95 |
1 See product pages and user’s guide for operating voltage limitations.
Basically, the new T500 does not offer the finer microstep resolutions of the T834 and T825, and the T834 supports very low operating voltages while the T825 supports higher operating voltages.
For those of you interested in more of the details of the stepper motor driver, the Tic T500 uses the new MP6500 from MPS, which we also offer on some low-cost MP6500 breakout boards with analog (small trimmer potentiometer) and digital (via PWM) current limit setting options.
In keeping with the tradition we started this year, we are offering an extra discount for the first customers, to help share in our celebration of releasing a new product. The first hundred customers to use coupon code T500INTRO can get up to two units for just $15.53! (Click to add the coupon code to your cart.) And we’ll even cover the shipping in the US! Note that this introductory offer applies only to the units without connectors soldered in.
Related products
Video: Introducing the Tic Stepper Motor Controllers
Our Tic Stepper Motor Controllers make basic control of stepper motors easy. This quick video shows you all the control interfaces you can use with our Tics to add stepper motors to your projects:
Making this video was actually the first time I’ve had a chance to play around with the Tics, and I was pleasantly surprised at how quickly I was able to set up the Tic with each interface option. Once I had everything connected, it only took a few minutes using the control software to get things moving for each setup.
This video also gives a sneak peek of our new Tic T500 (the red Tics in the opening shot). Like our new stepper motor drivers, the T500s are based on the MPS MP6500 bipolar stepper motor driver. Keep an eye on this blog for their release in the coming weeks.
Related products


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation










