Pololu Blog »
Prototyping hexapod motion with a Maestro USB servo controller
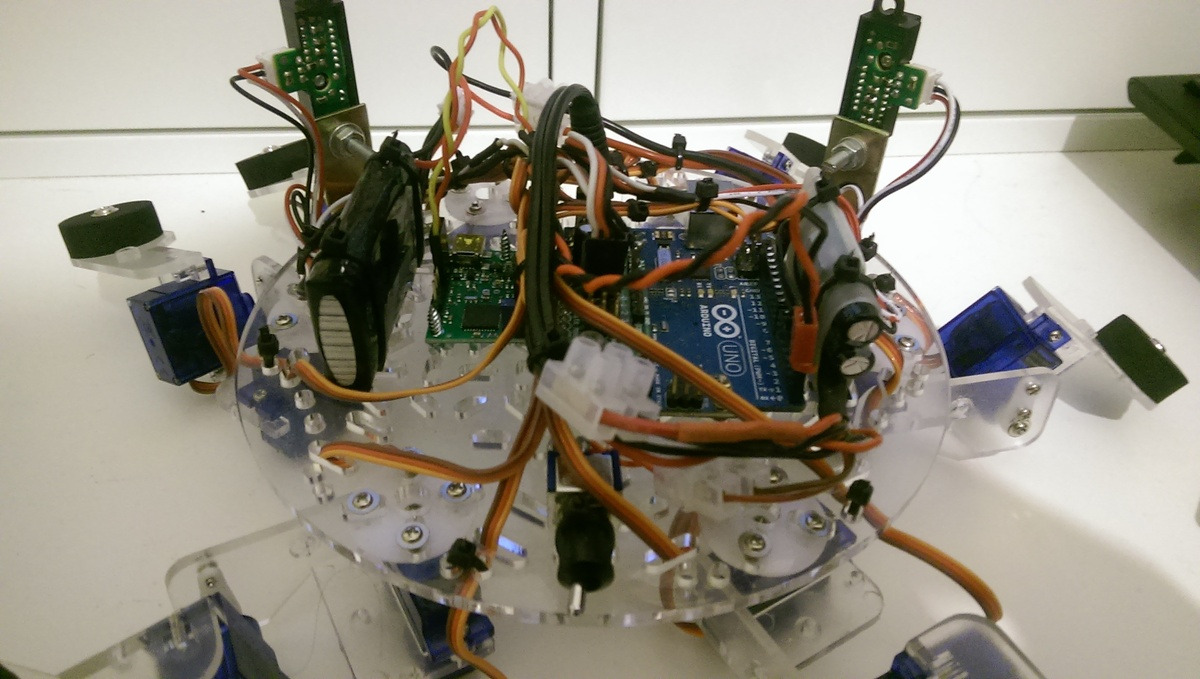 |
Chris Barlow posted this interesting write-up about how he is using the USB connection of a Mini Maestro servo controller to prototype motion control for his hexapod robot. He has been going over the build in detail on his blog, so check it out over there, and be sure to take a look at this short video below:
-

Motion tracking skeleton at Cedar Gables Inn
- 20 October 2015Forum user Ken constructed a spine-chilling Halloween project that is featured at the Cedar Gables Inn Bed and Breakfast in Napa, California. His...
-

HPCB micro metal gearmotors with extended motor shafts
- 25 October 2015It has been a few months since we introduced our new high-power micro metal gearmotors with longer life carbon brushes. We now have them available...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation










