Pololu Blog »
New version of the Zumo Shield for Arduino - now with full IMU!
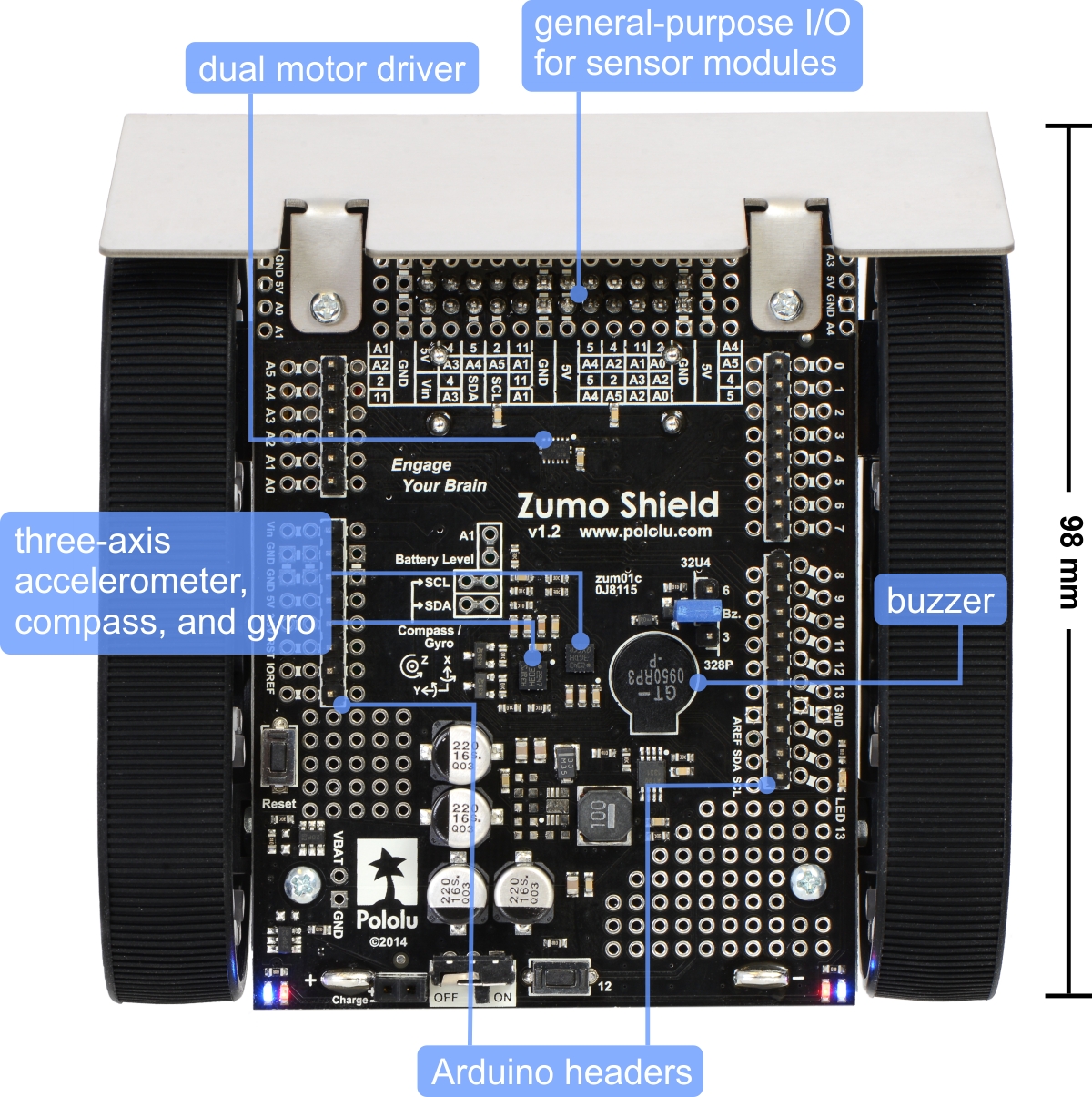 |
We posted recently about how progress in MEMS sensors has resulted in a constant stream of improved Pololu breakout boards. This week, we brought some of that technological progress to our Zumo robot with the release of a new “v1.2” version of the Zumo Shield for Arduino. This new version upgrades the previously-included LSM303DLHC compass to nine channels of inertial sensing using the newer LSM303D compass and L3GD20H gyroscope.
That means that the new Zumo shield includes a full inertial measurement unit (IMU) – the equivalent of a MinIMU-9 v3 – letting you turn it into a complete AHRS by adding an Arduino or compatible controller.
The v1.2 update extends to three new products:
- Zumo Shield for Arduino, v1.2
- Zumo Robot Kit for Arduino, v1.2 (No Motors)
- Zumo Robot for Arduino, v1.2 (Assembled with 75:1 HP Motors)
Other parts, such as the Zumo chassis, sumo blade, and reflectance sensor array, are not affected by this update, and the new Zumo shield is mechanically and electrically compatible with the previous model. They are also completely code-compatible except for the MEMS sensor aspects, which are already supported by our open-source Arduino libraries.
Related products



-

Closed Friday, July 4
- 2 July 2014We will be closed on Friday, July 4 for Independence Day. Orders placed after 2 PM Pacific Time on Thursday, July 3 will be shipped on Monday, July...
-

Hexapod robot running ROS
- 9 July 2014One of our customers made a hexapod that is controlled with a PlayStation controller. It uses our 18-channel Mini Maestro to command the servos...
7 comments

The schematic diagram doesn't list some P/Ns. For example what is the P/N for a boost converter?
No P/Ns for MOSFETs either.
As I am starting to experiment with using another microcontroller board with this shield, I can expect anything,
even burning some parts. It would be good to know the replacements P/N
Jan

We do not reveal the IC used for the boost regulator circuit on the Zumo. We do not want to commit to specific MOSFETs, but any generic MOSFETs that fit those footprints and match the obvious parameters should be fine.
- Jeremy

Thanks,
Jimmy
void on_contact_made()
{
#ifdef LOG_SERIAL
Serial.print("contact made");
Serial.println();
#endif
in_contact = true;
contact_made_time = loop_start_time;
setForwardSpeed(FullSpeed);
buzzer.playFromProgramSpace(sound_effect);
}

Blog comments aren't a very good place for this kind of discussion, but we would be happy to help you out if you post your questions on our forum.
- Ben

I'm looking for ways to solve my IMU-crashing problem due to noise from my motors in my self-balancing robot set-up and was wondering if this shield would do the job in preventing such noise-related crash.
Thanks in advance!
Eduardo.

The IMU on the shield is powered from the 3.3V line of the Arduino, so it is separated from the motor voltage by a regulator. That should provide some isolation from noise on the motors, and in general we expect it to be good enough to do balancing with the Zumo. The Arduino library for our Zumo 32U4 robot includes a balancing example that you might be interested in.
If that did not answer your question or you would like help troubleshooting, our forum is a better place for an in depth discussion.
-Claire
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation
