Electronics » Sensors » Proximity Sensors and Range Finders »
3-Channel Wide FOV Time-of-Flight Distance Sensor for TI-RSLK MAX Using OPT3101

This board is a 3-channel time-of-flight proximity and distance sensor module based on the OPT3101 IC from Texas Instruments. It emits infrared light in one of three selectable directions with its six integrated LEDs and measures distance by measuring the time delay of the reflected signal. Distance measurements can be read through a digital I²C interface. The module is designed to mount to the front of the TI-RSLK MAX robot. The combined field of view of the three sensing zones is almost 180 degrees, and the maximum range is about one meter.
 Compare all products in Proximity Sensors and Range Finders or TI Robotics System Learning Kit MAX (TI-RSLK MAX) Parts and Accessories or Lidar/Time-of-Flight Range Finders.
Compare all products in Proximity Sensors and Range Finders or TI Robotics System Learning Kit MAX (TI-RSLK MAX) Parts and Accessories or Lidar/Time-of-Flight Range Finders.
| Description | Specs (11) | Pictures (20) | Resources (9) | FAQs (1) | On the blog (0) | Distributors (3) |
|---|
- How accurate are the distance readings from the 3-Channel Wide FOV Time-of-Flight Distance Sensor for TI-RSLK MAX Using OPT3101?
The OPT3101 provides distance (phase) readings as 16-bit numbers in units of 0.2287 mm. These numbers represent the distance between the edge of the board and the object that the sensor is detecting. The accuracy of a measurement is affected by a variety of factors including the temperature, ambient lighting, and properties of the object being detected such as its size and reflectivity. Each sensor is individually factory calibrated to compensate for some of these sources of error, and further calibration and compensation for a particular application can be done in the main controller that reads the sensor values.
Temperature variations can contribute approximately 1 cm of error, while a changing amount of ambient light can affect it by about 2 cm. The OPT3101 provides temperature and ambient light measurements in the TMAIN and AMB_DATA registers fields, respectively.
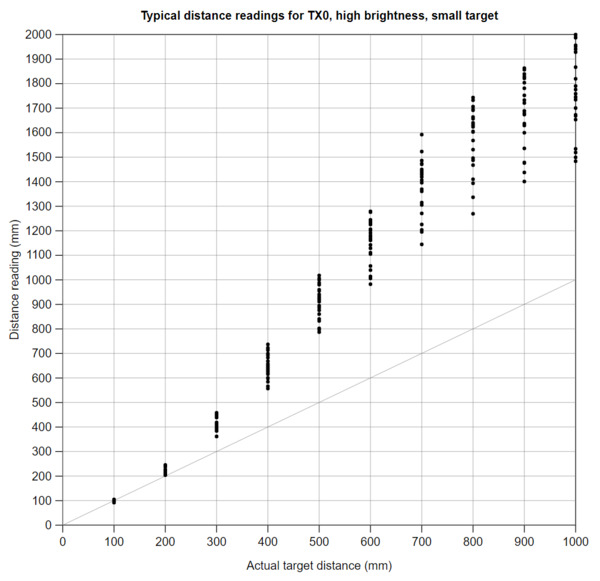
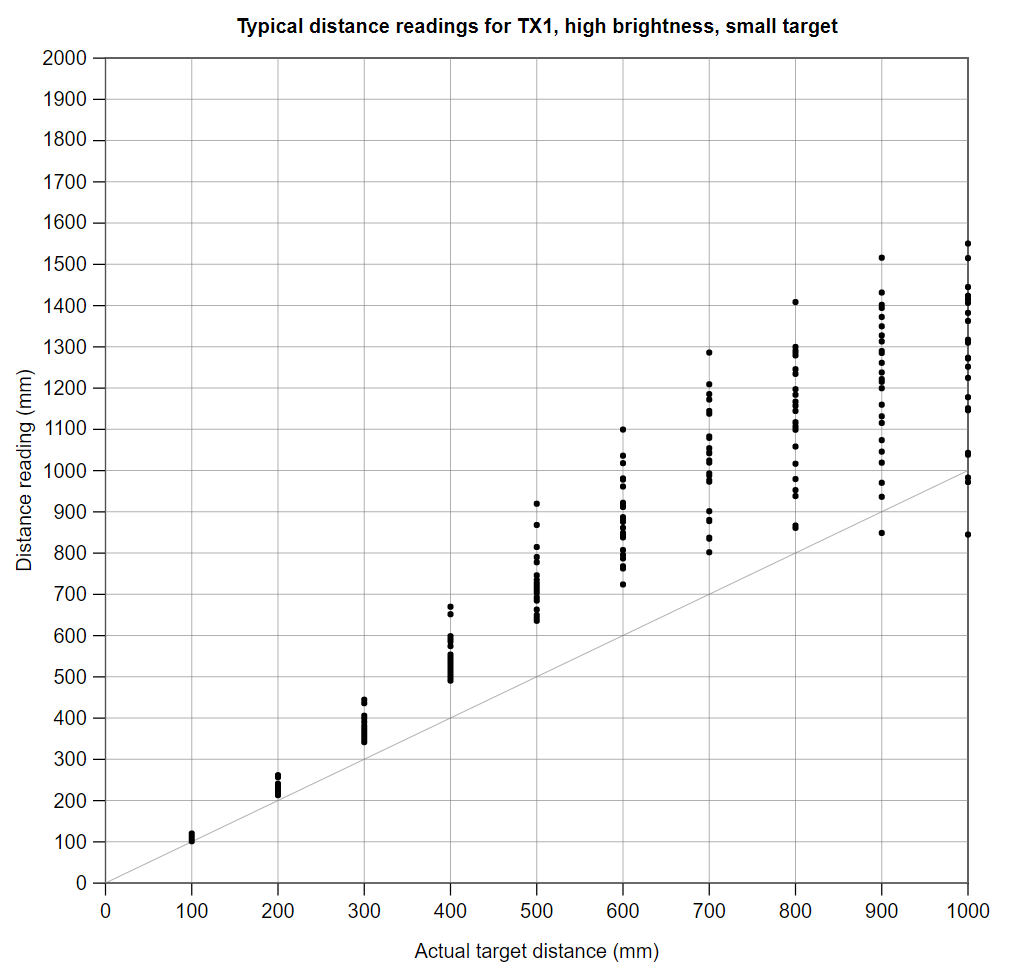
An important factor affecting the distance readings is the amount of light reflected from the target object. In general, more light allows more accurate readings. The larger the signal from the target, the more it will overpower the reflections from other objects and measurement noise. The OPT3101 reports the amplitude of the reflected light in its AMP_OUT register, so different thresholds can be used for different applications. We have generally seen that readings with amplitudes below about 200 to 400 start to become too inaccurate to be useful.
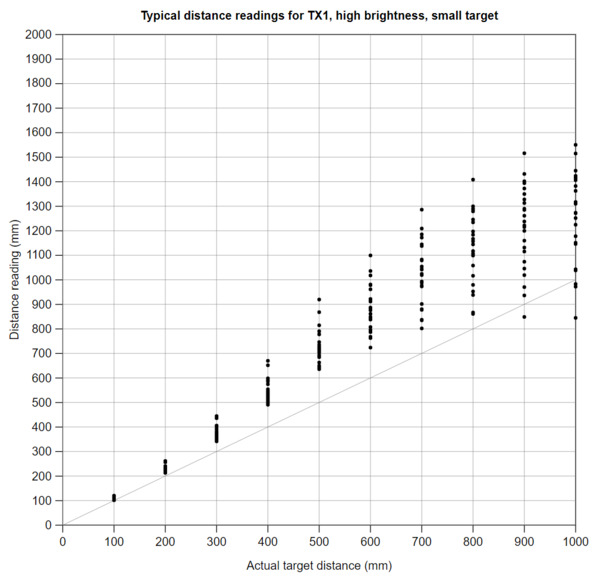
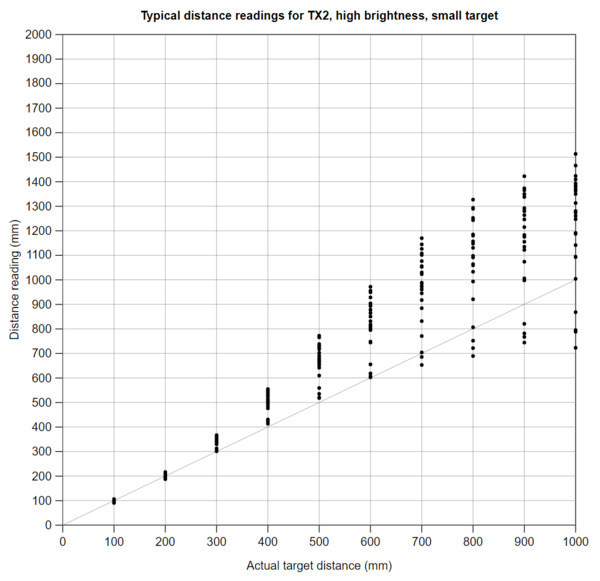
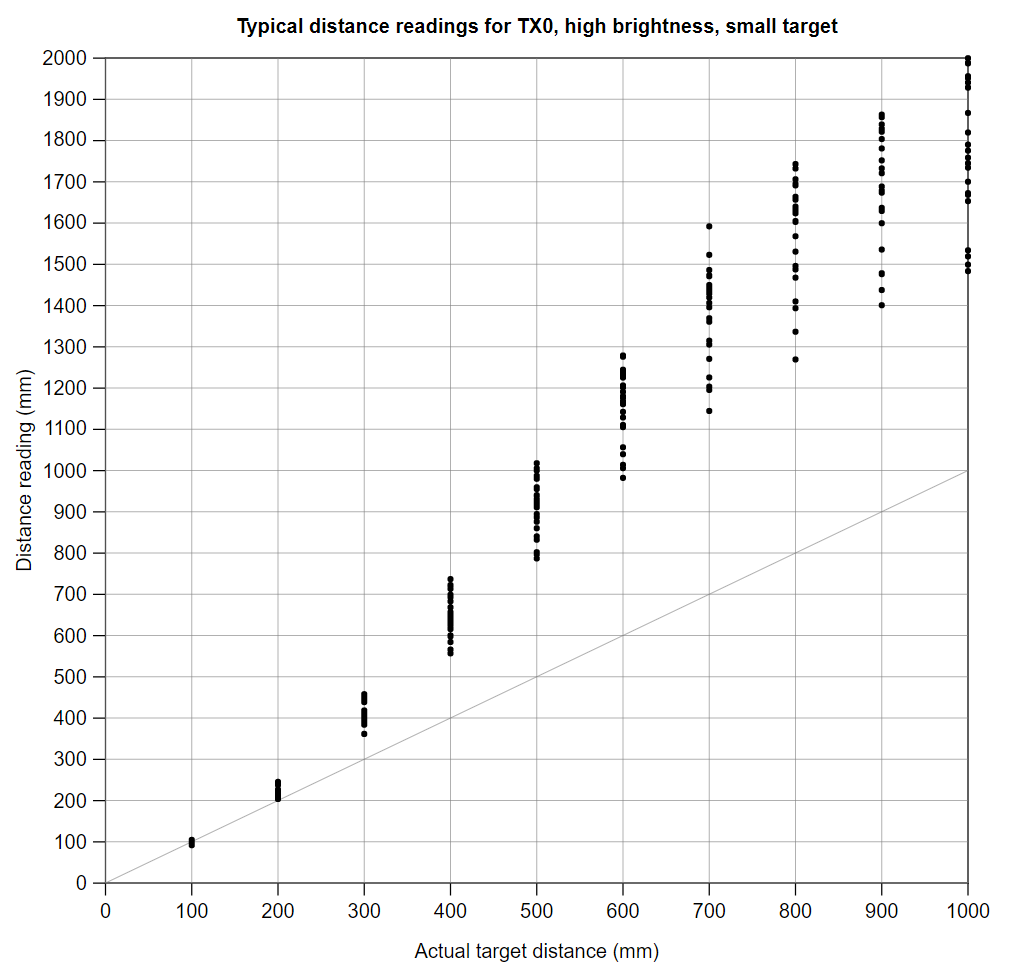
The following charts show some typical results directly from the sensor using a 125mm x 75mm white object. TX0 and TX2 readings are taken 55 degrees off of the center line, and TX1 readings are directly in front of the sensor.

Related products










Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
