Support » Tic Stepper Motor Controller User’s Guide » 4. Setting up the controller »
4.9. Setting up analog position control
This section explains how to set up the Tic to read an analog input and use that signal to control the position of the stepper motor.
It is important to note that the Tic does not receive any kind of feedback from the stepper motor about its position. When you power on the Tic, it does not know what position the stepper motor is in, so it will read the analog input and then assume that the stepper motor is already at the position that corresponds to that input. Also, there are other error conditions besides losing power that will cause the Tic to become uncertain about its current position from the analog input when the system returns to normal (see Section 5.4).
If you have not done so already, you should follow the instructions in Section 4.3 to configure and test your stepper motor. Next, with the system unpowered, connect your analog signal to the Tic as described below.
If you are using a potentiometer to make the analog signal, you should connect the potentiometer’s wiper to SDA/AN and connect the other two ends to GND and SCL, as shown in the diagram below. In analog mode, the SCL line is driven high (5 V) to power the potentiometer (note that the SCL pin is protected by a 220 Ω or 470 Ω series resistor, so it will not be damaged by inadvertent shorts to ground).
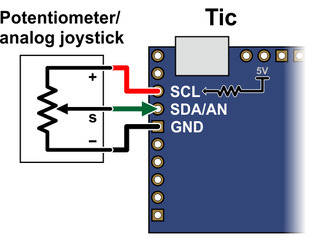 |
If you are using something other than a potentiometer to generate the analog signal, make sure that the ground node of that device is connected to a GND pin on the Tic, and that the analog signal from that device is connected to the Tic’s SDA/AN line. The Tic’s analog input can only accept signals between 0 V and 5 V with respect to GND; signals outside of this range could damage the Tic.
Now connect the Tic to your computer via USB. In the Tic Control Center software, set the Tic’s control mode to “Analog position” and click “Apply settings”. In the “Scaling” box, click “Learn…” to start the Input Setup Wizard. The wizard will help you measure the neutral, maximum, and minimum positions of your analog signal. When the wizard is finished, it will set five of the input scaling parameters (input maximum, input neutral max, input neutral min, input minimum, and invert input direction) appropriately so that the neutral analog signal gets mapped to a position of 0, the maximum analog signal gets mapped to the target maximum, and the minimum analog signal gets mapped to the target minimum. If you have previously changed the target maximum and target minimum, you should set them back to their default values of 200 and -200, respectively. Click “Apply settings” to save these settings to the Tic.
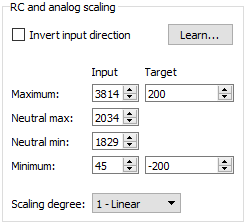 |
Example Tic scaling settings for analog position control mode. |
|---|
Now connect motor power and click “Resume” to start your system. If you move your input from the neutral position to the maximum position, you should see the motor move by 200 steps. If you move your input from the neutral position to the minimum position, you should see the motor move by 200 steps in the other direction.
You should make sure that the motor is moving in the correct direction. If it is not, you can check the “Invert motor direction” checkbox to fix it. (You could also rewire the stepper motor to reverse the current in one coil, but be sure to turn off the stepper motor power before doing that.)
Next, you should set the target maximum and minimum parameters in the “Scaling” box to set the range of motion of your system. The target maximum must be zero or more, and the target minimum must zero or less. These numbers correspond to microsteps if you have enabled microstepping.
Finally, check the “Scaling degree” parameter. The default setting is “1 – Linear”. If you want finer control near the neutral point of your input and coarser control near the ends, you can change it to one of the higher settings.
For details about how the input scaling works, see Section 5.2.
Related products










Related categories


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
