Pololu Blog » Posts tagged “community projects” »
Posts tagged “community projects” (Page 33)
You are currently viewing a selection of posts from the Pololu Blog. You can also view all the posts.
Popular tags: community projects new products raspberry pi arduino more…
AIRbot
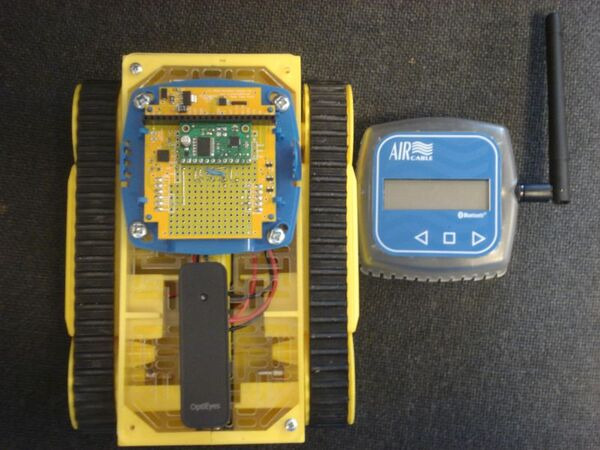 |
AIRbot is a robot that can be controlled by a cellphone and can send images back to the cellphone. It uses a yellow RP5 tracked chassis, a transparent clear RP5 expansion plate, and a qik 2s9v1 dual serial motor controller along with the AIRcable S.D.K. and the AIRcable OptiEyes. The source code (both AIRcable and Nokia) and circuit diagrams are freely available.
Featured link: http://wiki.opensensors.org/airbot
Automatic Infrared Light Source Tracking HD Camcorder
 |
In this project, an HD camcorder sits on a pan/tilt mount controlled by a Micro Maestro 6-Channel USB Servo Controller. A Wiimote is used to track an IR light source. Here is a video taken from the mounted camcorder:
Featured link: http://helifreak.com/showthread.php?p=1868143#post1868143
Using the Pololu Pushbutton Power Switch
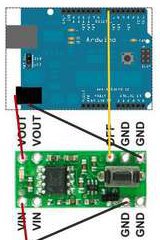 |
This instructable shows how to power an Arduino through the Pololu Pushbutton Power Switch and use the self-shutoff feature.
Featured link: http://www.instructables.com/id/Using-the-Pololu-Pushbutton-Power-Switch/
Maestro Support for RoboRealm
 |
This module for RoboRealm provides an interface to the Pololu Maestro USB servo controllers, linking advanced video processing to RC servo motion control.
Featured link: http://www.roborealm.com/help/Pololu_Maestro.php
R2D2 dome position control
 |
This replica of the famous Star Wars droid R2D2, built by Glenn Pipe, uses a Jrk USB motor controller for position control. The video below shows how Glenn uses the Jrk Configuration Utility to control and analyze his system, and his blog post has more information.
Featured link: http://astromech.wordpress.com/2010/02/05/adding-position-control-to-r2s-dome/
Paparazzi Autopilot for Linux
 |
Patrick Hickey and Bradley Lord use a Pololu Micro Maestro for servo output and a Pololu 4 servo multiplexer to support manual control override in their model aircraft autopilot project.
Featured link: http://moreproductive.org/autopilot/
Active Magnetic Bearing: Tripod Floater v2.0
In this video, Meindert Norg from Norg Consulting demonstrates his active magnetic bearing, Tripod Floater. The closed-loop system uses three Pololu 18v15 high-power motor drivers as PWM amplifiers to power the magnetic coils that keep the module floating beneath the metal plate.
February, 2010 update: the Tripod Floater is now wireless:
Featured link: http://www.youtube.com/watch?v=e-f_H68Rl4g
The Haunted Organist by Mark Goodson
Customer Mark Goodson constructed this spooky animatronic skeleton using the Jrk USB Motor Controller. See the final result below:
Featured link: http://www.youtube.com/watch?v=wiimQNGnNBY
Beacon Locating Robot - Powered by Arduino and IR Transceiver
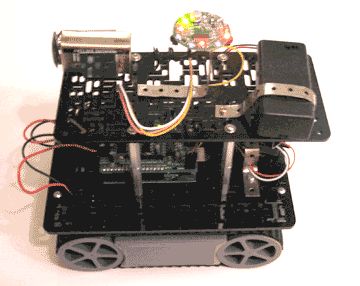 |
This beacon-chasing robot by Christopher Hazlett was built with our IR Beacon, an RP5 Tracked Chassis, and an Arduino.
23 Oct 2018 edit: You can find a video of it driving here and a GitHub page here.
Arduino Muscle Car
 |
This DIY article for Popular Science shows how to use our Orangutan LV-168 robot controller to make an autonomous, obstacle-avoiding 1:32-scale Hummer. The Arduino sketch used to control the car makes use of our Arduino Orangutan libraries and is available for download on the second page of the article.
Featured link: http://www.popsci.com/diy/article/2008-07/arduino-muscle-car


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation







