Pololu Blog »
Romi and Raspberry Pi robot
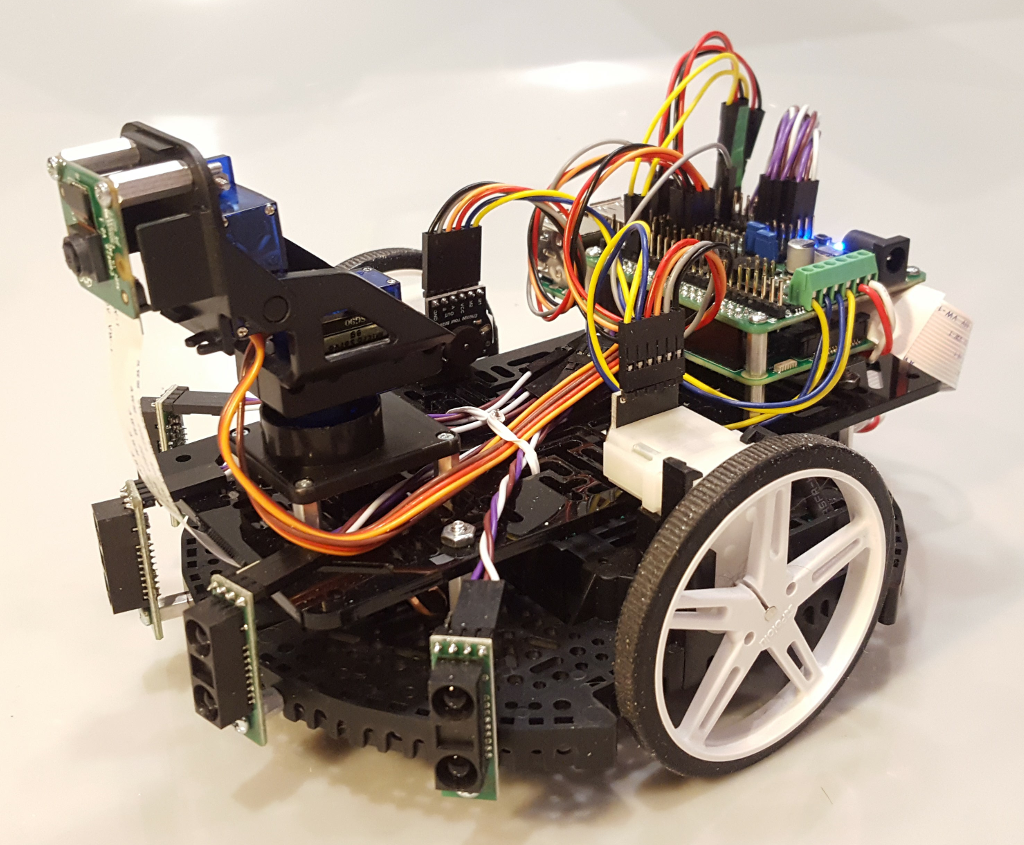
Forum user DrGFreeman has been busy making robots. I wrote earlier about his Custom Mini Sumo robot; now here is his Romi Chassis and Raspberry Pi robot. It solves mazes using a webcam to do line tracking and intersection identification. This robot is a great example of how a variety of Pololu robot parts can combine into an attractive and functional robot. A black Romi chassis kit provides the base for the robot, to which DrGFreeman added a encoder pair kit and ball caster kit. An A-Star 32U4 Robot Controller SV with Raspberry Pi Bridge drives the motors and monitors four Sharp GP2Y0A60SZLF analog distance sensors and the Romi encoders. The robot controller and the Raspberry Pi communicate via I²C and are elevated above the chassis on a narrow Pololu RP5/Rover 5 expansion plate.
DrGFreeman is also working on a mast for three VL53L0X time-of-flight distance sensor carriers that he plans to add for simultaneous localization and mapping (SLAM).
 |
For more videos, pictures, and details, see the forum thread. The robot’s Raspberry Pi (Python) and Arduino code is available on GitHub.
Related products







-

New 5V step-up/step-down voltage regulator S9V11F5
- 27 March 2017Our newest step-up/step-down voltage regulator, the S9V11F5, takes input voltages between 2 V and 16 V and increases or decreases that voltage as...
-

Aluminum standoff for Raspberry Pi
- 29 March 2017We are now carrying the Aluminum Standoff for Raspberry Pi: 11mm Length, 4mm M2.5 Thread, M-F. The 11 mm body length is just right for mounting...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation
