Pololu Blog »
Community project: 2pi, a simple line following robot
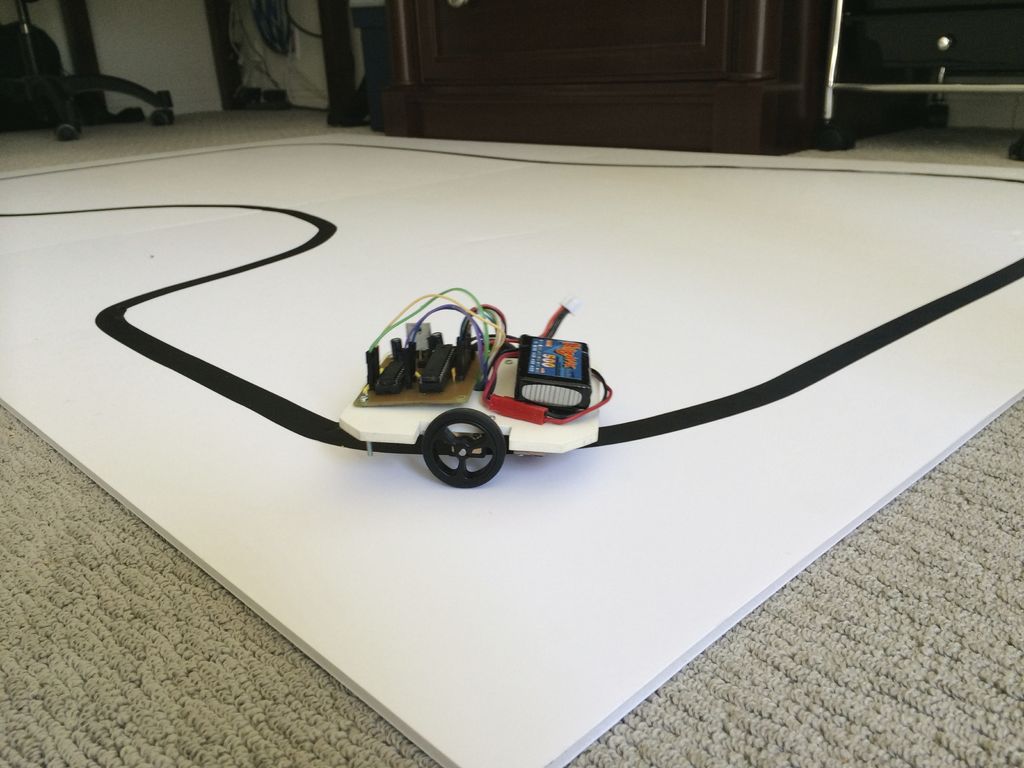 |
The 2pi, built by Mark Moran, is a line following robot based on our 3pi robot. The 2pi uses our 100:1 micro metal gearmotors, motor brackets, 32mm wheels, 1/2″ ball caster, QTR-8RC reflectance sensor array, and U3V12F9 switching step-up voltage regulator. All those components are mounted to a chassis that was cut from PVC foam.
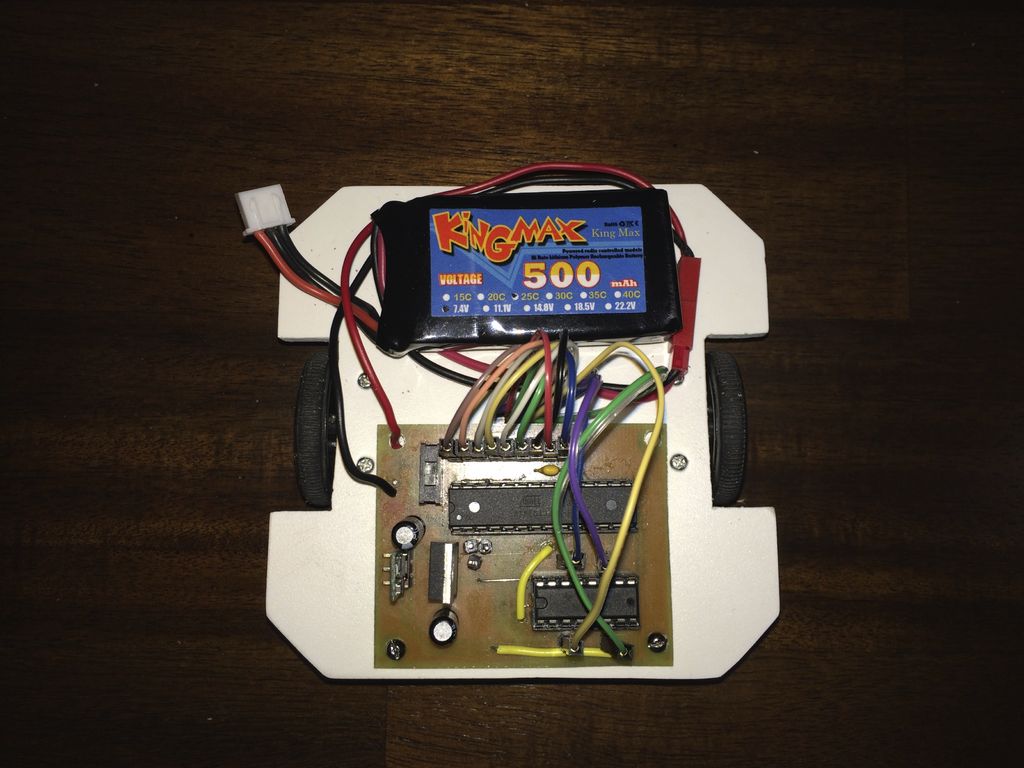 |
The robot uses a custom made PCB with an ATmega328 as the brain (the same AVR chip used in the Arduino Uno, some of our Orangutan Robot Controllers, and, of course, the 3pi). You can see the 2pi following a line in the video below.
For more information about how Mark built his robot, check out his Instructables guide.
Related products






-

New products: Magnetic quadrature encoders for micro metal gearmotors
- 2 October 2014Everyone wants encoders on their motors. If you think you don’t, you just don’t know it yet. I think the main reason is that we really just want...
-

Creepy eyes Halloween prop
- 3 October 2014In the lead up to Halloween, I thought it would be fun to make some Halloween-themed props; in particular, I was interested in making something...
0 comments
Post a comment


Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
