Arduino Uno DIP Edition

The Arduino Uno, the successor to the Arduino Duemilanove, is a microcontroller board based on a removable, dual-inline-package (DIP) ATmega328 AVR microcontroller. It has 20 digital input/output pins (of which 6 can be used as PWM outputs and 6 can be used as analog inputs), a 16 MHz resonator, a USB connection, a power jack, an in-circuit system programming (ICSP) header, and a reset button. The Arduino has an extensive support community, which makes it a very easy way to get started working with embedded electronics.
| Description | Specs (12) | Pictures (3) | Resources (12) | FAQs (0) | On the blog (2) | Distributors (0) |
|---|
File downloads
-
Arduino Uno EAGLE reference design (207k zip)
-
Arduino Uno schematic (34k pdf)
Recommended links
-
How to get Arduino running on Windows
A tutorial for setting up an Arduino environment on Windows.
-
Arduino Software
Arduino integrated development environment (IDE) software
-
Arduino Programming Reference
-
Arduino Forum
-
LSM303 Arduino library
This is a library for the Arduino that interfaces with our LSM303D, LSM303DLHC, and LSM303DLM 3D compass and accelerometer carriers as well as the compass and accelerometer ICs on the MinIMU-9 v3 and AltIMU-10 v4 (it also works with older versions of those boards, some of which used the LSM303DLH and LSM303DLHC). It makes it simple to configure the device and read the raw accelerometer and magnetometer data, and it has a function for computing the tilt-compensated heading for those looking to use the LSM303 as a tilt-compensated compass.
-
L3G Arduino library
This is a library for the Arduino that interfaces with our L3GD20H and L3GD20 3-axis gyro carriers as well as the gyros on the MinIMU-9 v3 and AltIMU-10 v3 (it also works with older versions of those boards, some of which used the L3G4200D and the L3GD20). It makes it simple to configure the device and read the raw gyro data.
-
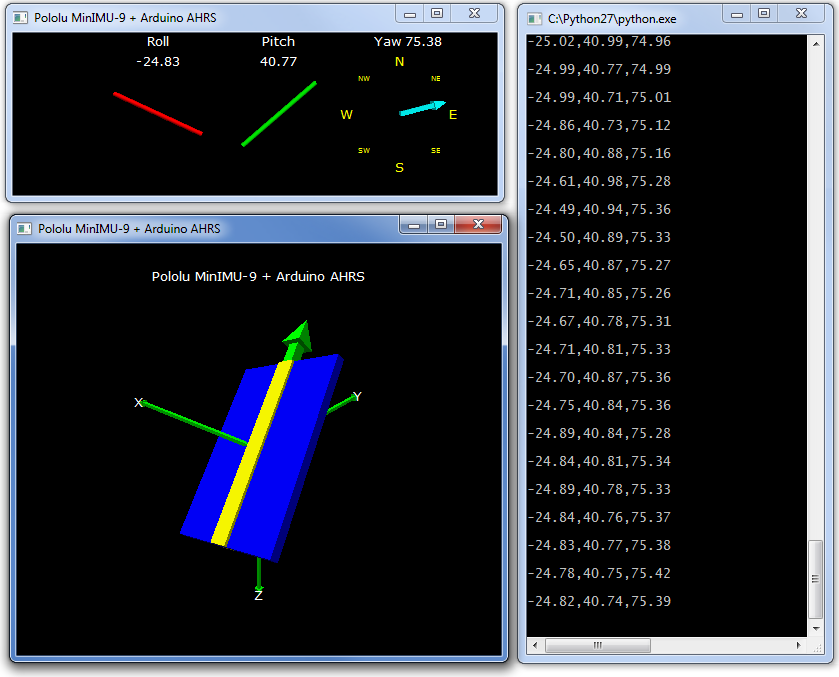
MinIMU-9 + Arduino AHRS
This Arduino program (sketch) allows an Arduino-compatible board like an A-Star connected to a MinIMU-9 v6 or AltIMU-10 v6 (or older versions of those boards) to function as an attitude and heading reference system, calculating estimated roll, pitch, and yaw angles from sensor readings that can be visualized with a 3D test program on a PC. It is based on the work of Jordi Munoz, William Premerlani, Jose Julio, and Doug Weibel.
Visualization of AHRS orientation calculated from MinIMU-9 readings.
-
Arduino Library for the Pololu QTR Reflectance Sensors
This guide explains how to use the QTRSensors library to read Pololu QTR reflectance sensors and QTR sensor arrays with Arduinos and Arduino-compatible devices like the Pololu Orangutan robot controllers.
-
Beacon Locating Robot – Powered by Arduino and IR Transceiver
A beacon-chasing robot built with our IR Beacon, an RP5 Tracked Chassis, and an Arduino. By Christopher Hazlett, December 2009.
-
“How to use the TB6612FNG motor driver with the Arduino for noobs”
This MeanPC.com guide explains how to control the TB6612FNG Dual Motor Driver Carrier with an Arduino.
Related products


















Related categories















Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2026 Pololu Corporation
