

This is a merged information page for Item #5051.
View normal product page.
Pololu item #:
5051
Brand:
Pololu
Status:
Active and Preferred

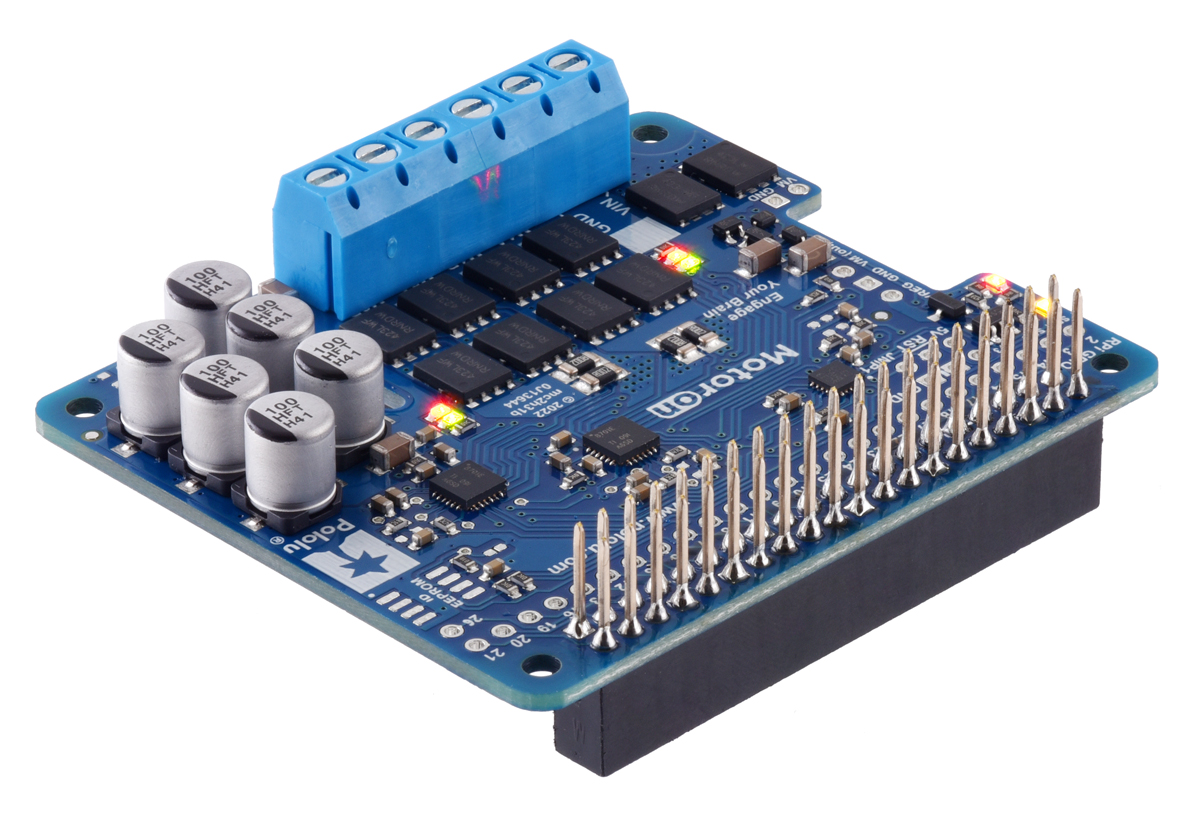
The Motoron M2H24v14 Dual High-Power Motor Controller makes it easy to control DC motors from a Raspberry Pi (Model B+ or newer) through an I²C interface. The M2H24v14 supports motor supply voltages from 6.5 V to 40 V and can deliver continuous output currents up to 14 A per motor. This version ships with aluminum standoffs and with soldered stackable headers and terminal blocks.
 Compare all products in Motoron M2H Dual High-Power Motor Controllers for Raspberry Pi.
Compare all products in Motoron M2H Dual High-Power Motor Controllers for Raspberry Pi.
|
Motoron M2H24v14 Dual High-Power Motor Controller for Raspberry Pi (Connectors Soldered). |
|---|
 |
Motoron M2H Dual High-Power Motor Controller for Raspberry Pi with connectors soldered. |
|---|
 |
Motoron M2H24v14 Dual High-Power Motor Controller for Raspberry Pi (Connectors Soldered), top view. |
|---|
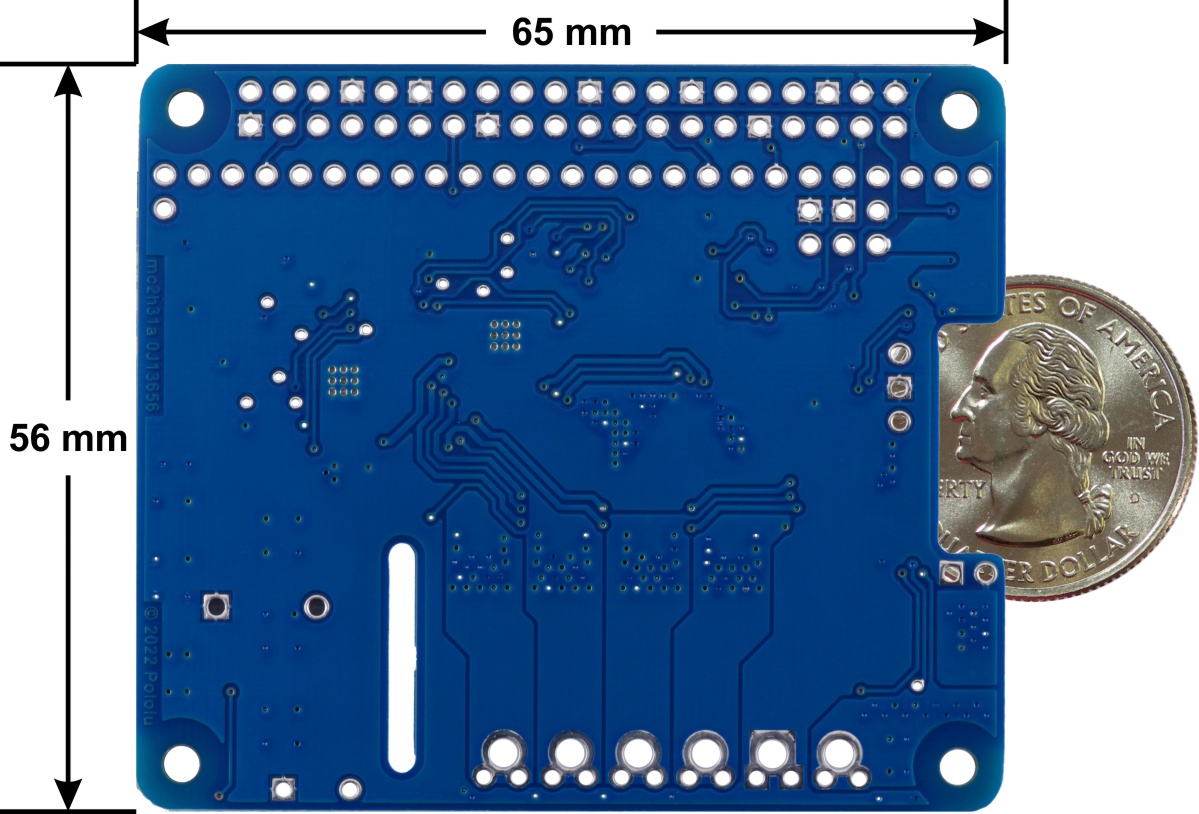 |
Motoron M2H18v18 or M2H24v14 Dual High-Power Motor Controller for Raspberry Pi, bottom view with dimensions. |
|---|
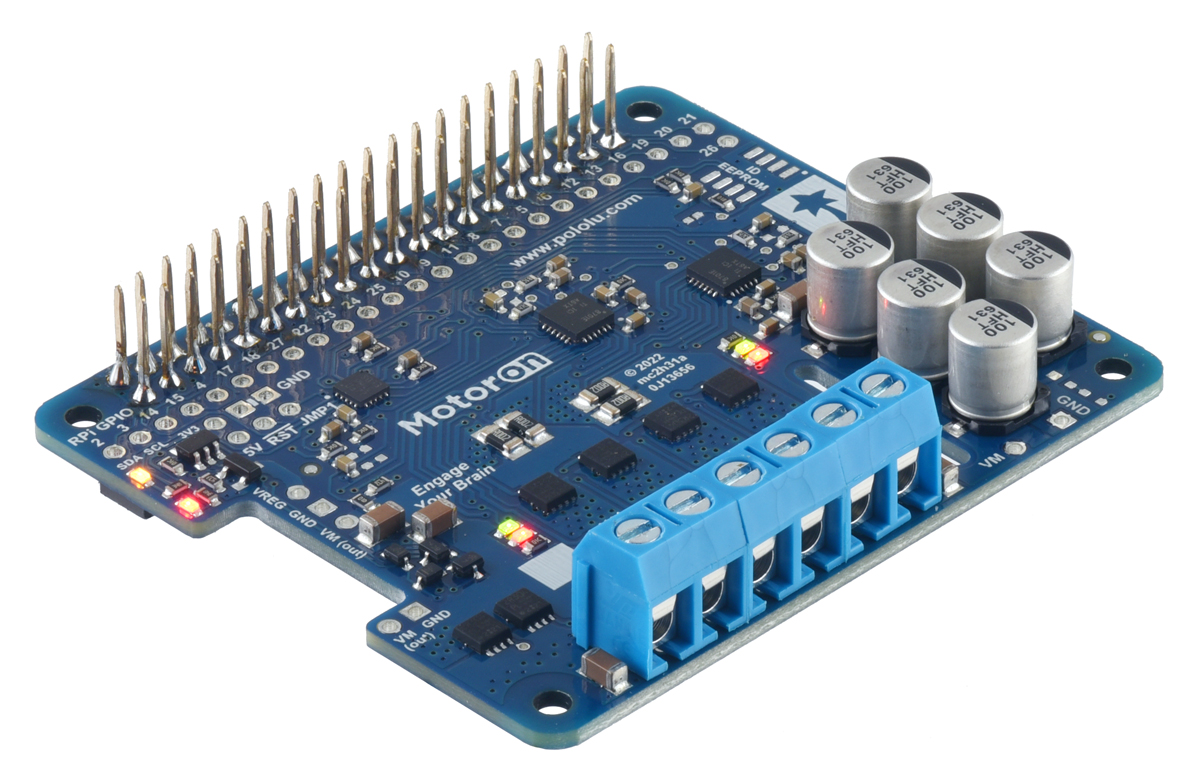 |
Motoron M2H24v14 Dual High-Power Motor Controller for Raspberry Pi (Connectors Soldered). |
|---|
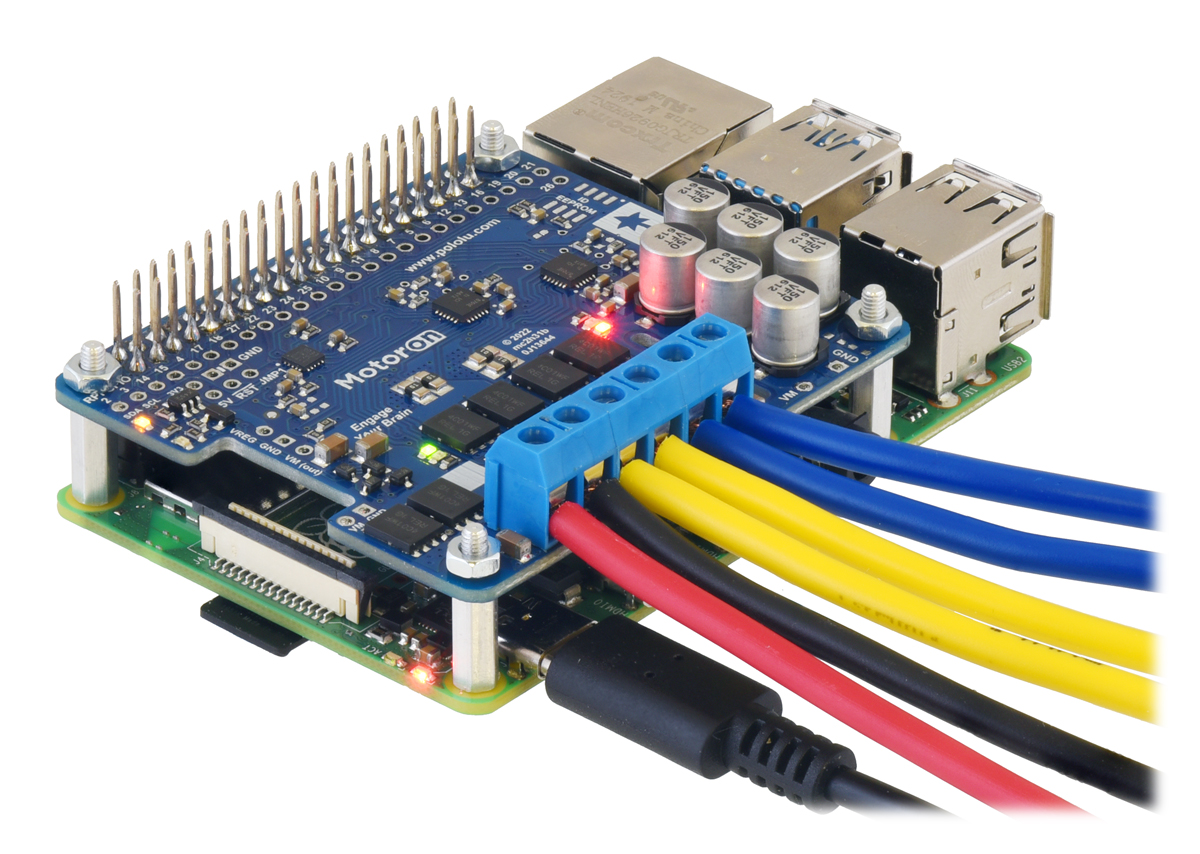 |
A Motoron M2H dual motor controller being controlled by a Raspberry Pi. |
|---|
 |
A Motoron M2H and a Motoron M3H256 being controlled by a Raspberry Pi, allowing for independent control of five motors. |
|---|
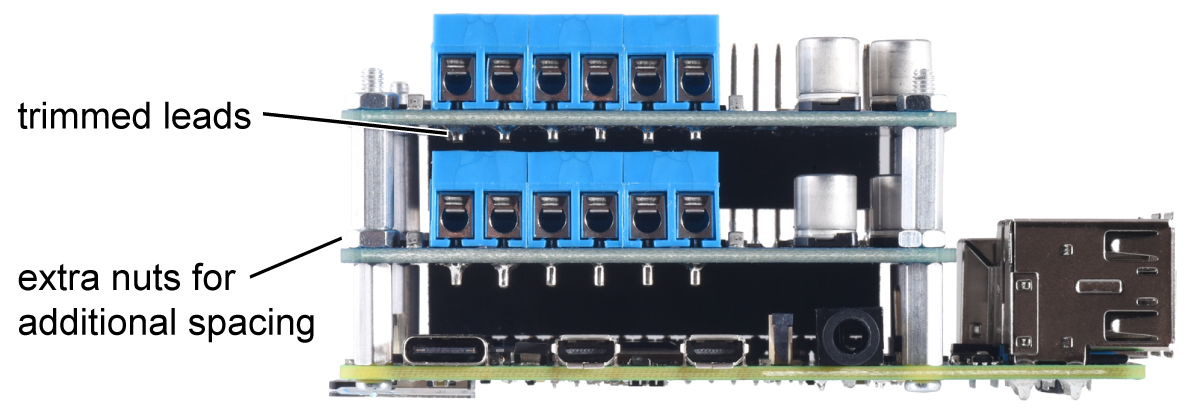 |
Two Motoron M2H boards with terminal blocks can be stacked if you trim the leads on the terminal blocks and space out each board using hex nuts in addition to the 11mm standoffs. |
|---|
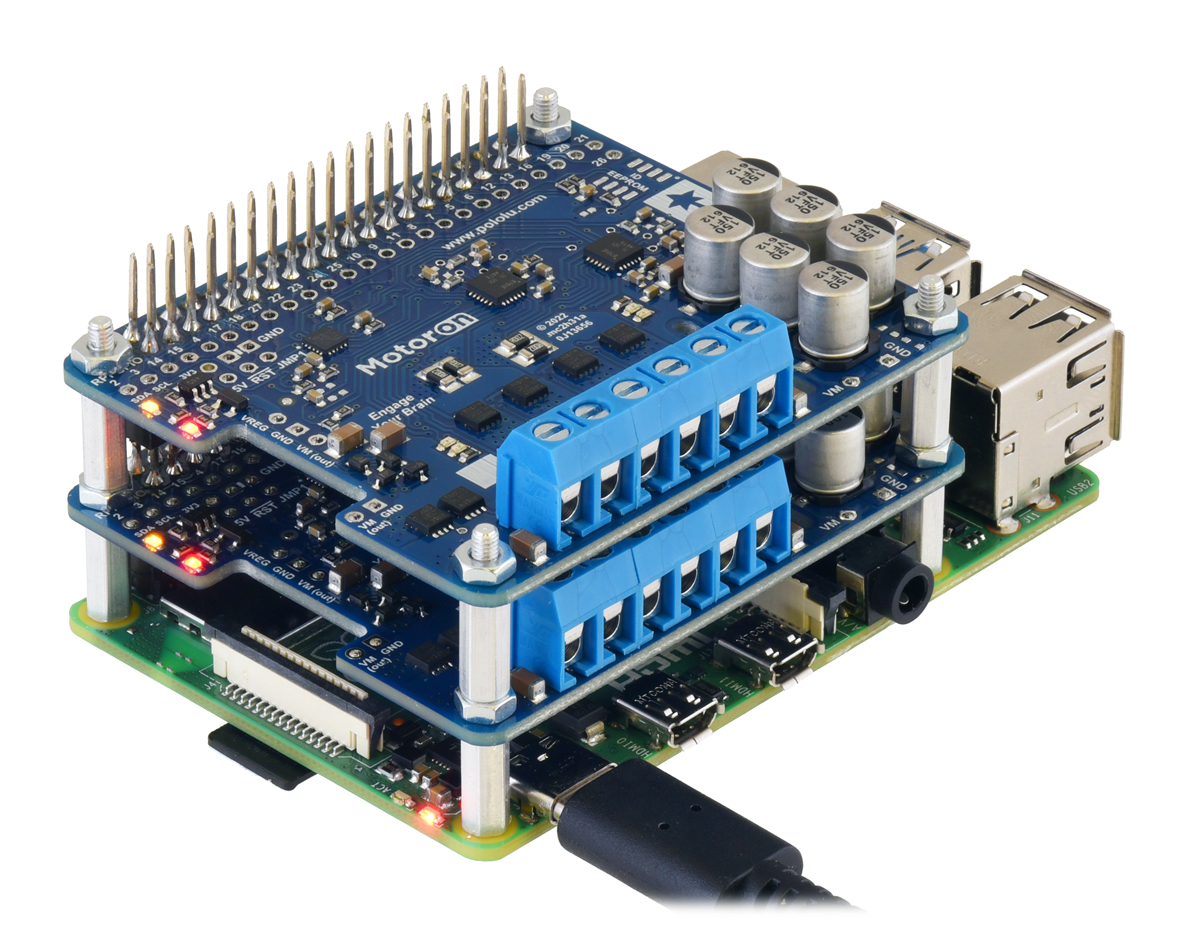 |
Two Motoron M2H shields stacked on a Raspberry Pi. |
|---|
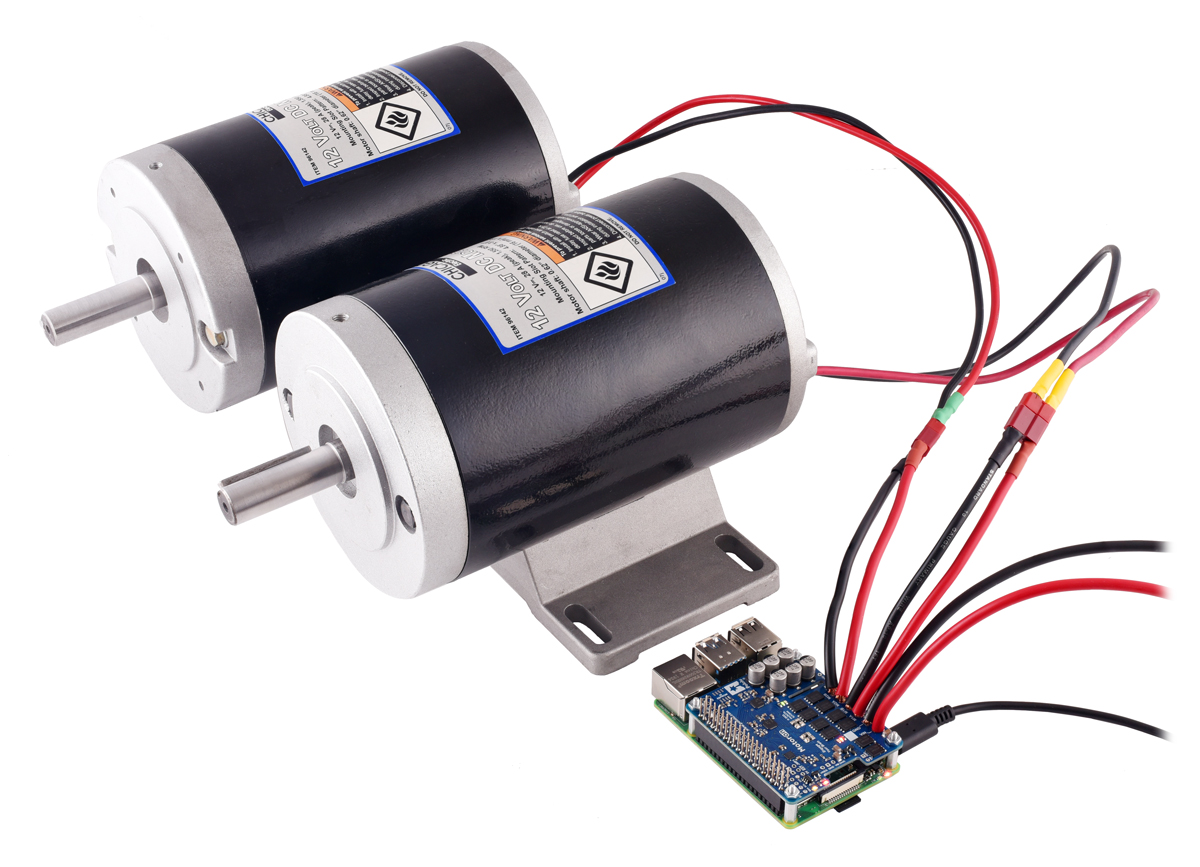 |
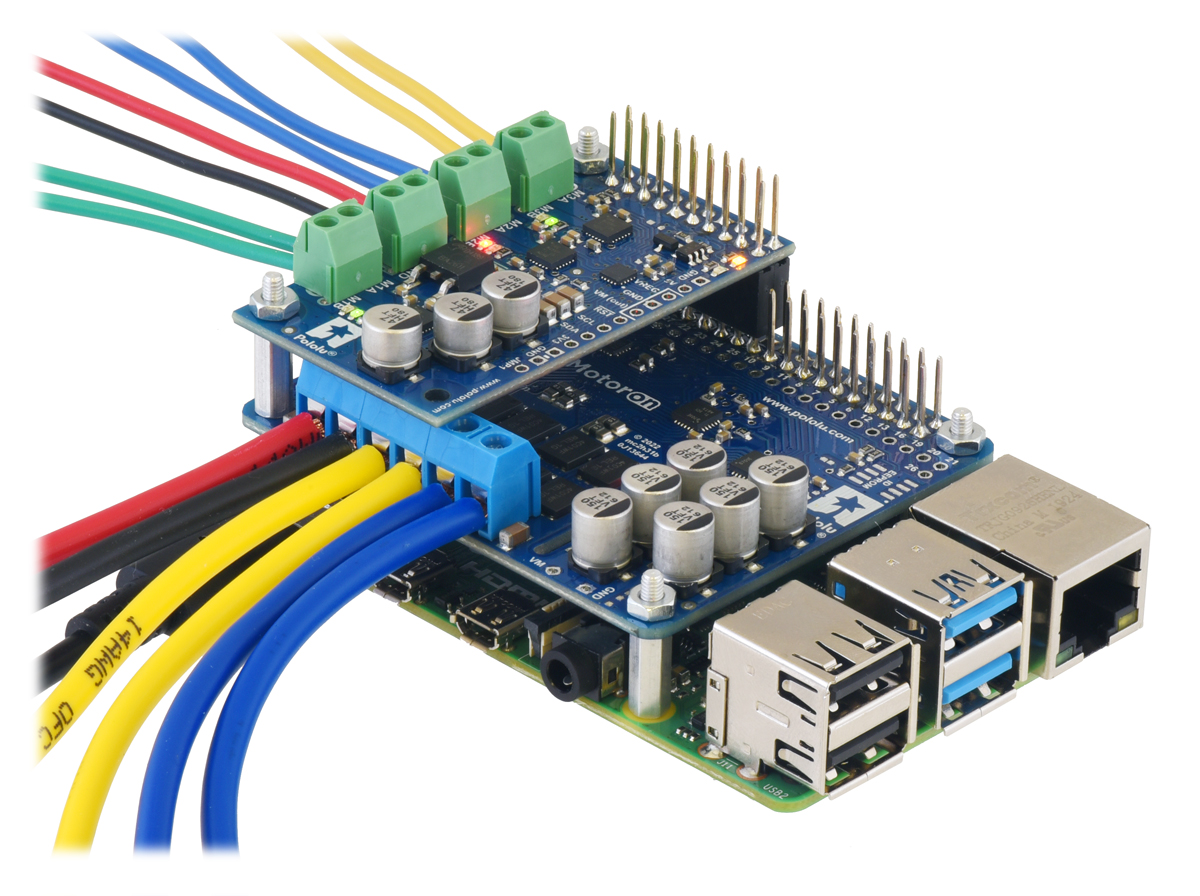
A Raspberry Pi using a Motoron M2H dual high-power motor controller to control a pair of high-power motors. |
|---|
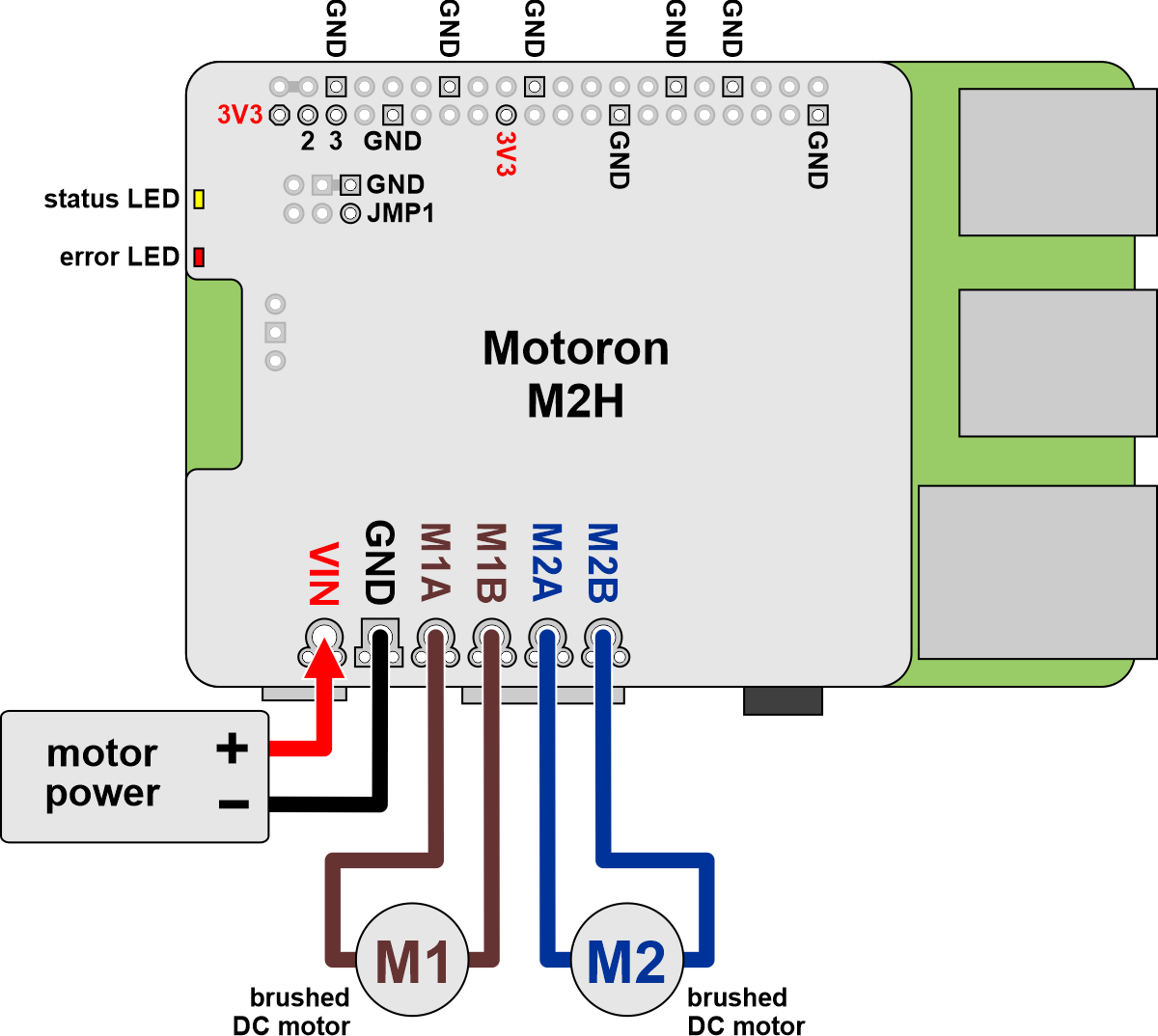 |
Using the Motoron M2H Dual High-Power Motor Controller with a Raspberry Pi. |
|---|
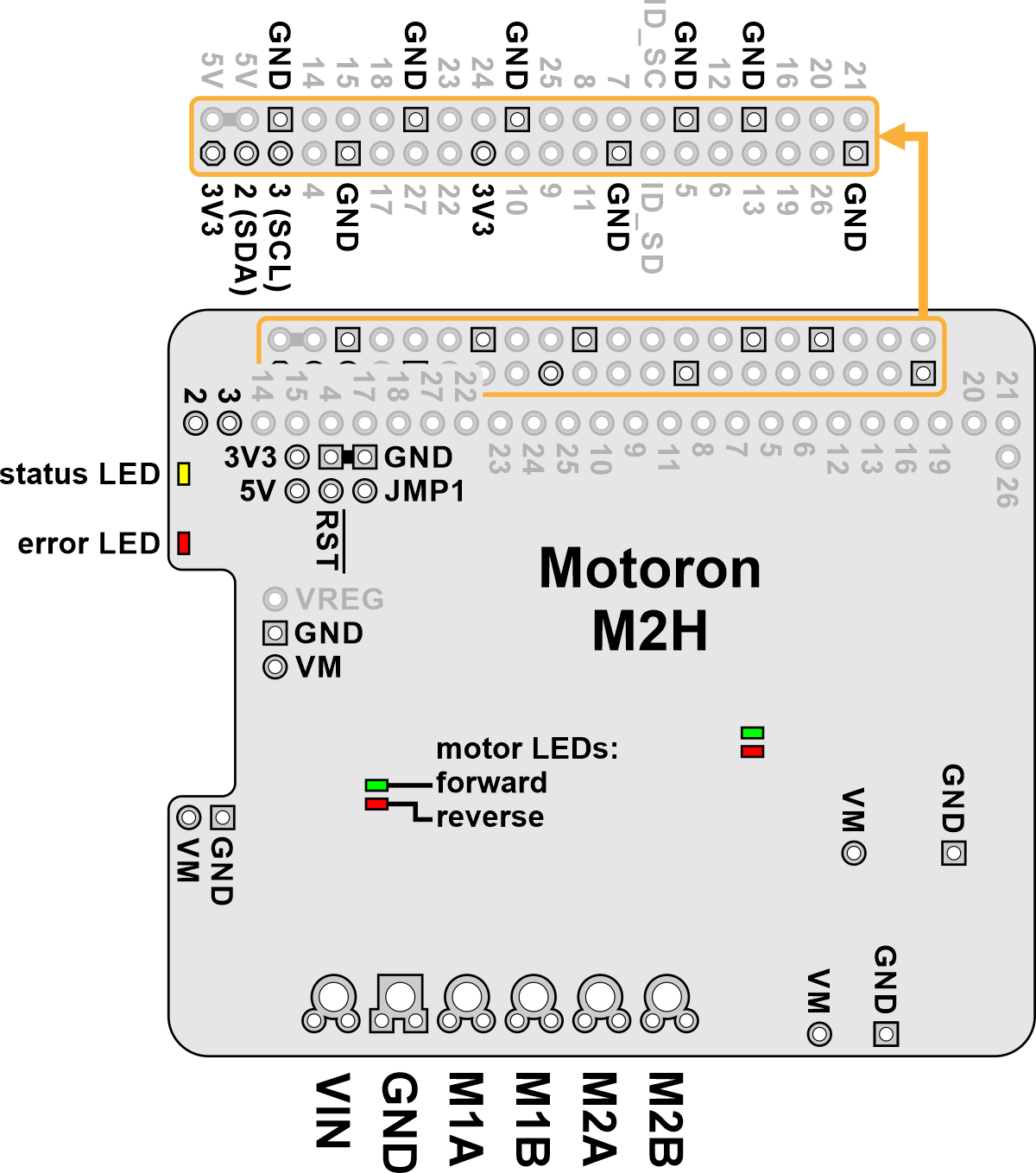 |
Motoron M2H Dual High-Power Motor Controller for Raspberry Pi pinout. |
|---|
The Motoron M2H family of dual high-power motor controller add-on boards makes it easy to control up two bidirectional, brushed DC motors with a compatible Raspberry Pi (Model B+ or newer). The M2H controllers are designed to stack on top of a Raspberry Pi (Model B+ or newer), similar to a HAT (Hardware Attached on Top), and multiple controllers can be stacked on top of each other, allowing independent control of many motors. Unlike most of our motor drivers and motor driver expansion boards for Raspberry Pi, the Motoron does not require any PWM outputs on your Raspberry Pi. Instead, the Raspberry Pi communicates with the Motoron using I²C, so only two GPIO pins are needed regardless of how many Motorons you connect. Four types are available so you can pick the one with the appropriate operating voltage range and output current capabilities for your project:
 Motoron M2H18v20 Dual High-Power Motor Controller for Raspberry Pi |
 Motoron M2H18v18 Dual High-Power Motor Controller for Raspberry Pi |
 Motoron M2H24v16 Dual High-Power Motor Controller for Raspberry Pi |
 Motoron M2H24v14 Dual High-Power Motor Controller for Raspberry Pi |
|
|---|---|---|---|---|
| Absolute max motor supply voltage: |
30 V | 40 V | ||
| Recommended max nominal battery voltage: |
18 V | 28 V | ||
| Max continuous current per channel: |
20 A | 18 A | 16 A | 14 A |
| Available versions: | ||||
Each of the four types above is available in three versions to provide different options for the through-hole connectors: they can be purchased as an assembled product with stackable headers and terminal blocks soldered in, as a kit with connectors included but not soldered in, or as a standalone board without connectors.
|
For a lower-power, lower-cost alternative, please consider the Motoron M3H256 Triple Motor Controller for Raspberry Pi. For applications using an Arduino or compatible controller, consider the Motoron M2S Dual High-Power Motor Controllers for Arduino.
|
|
The M2H24v14 controller supports motor supply voltages from 6.5 V to 40 V (absolute maximum, not intended for use with 36 V batteries) and can deliver continuous output currents up to 14 A per motor. The M2H24v14 can be distinguished from other types of M2H controllers by its smaller discrete MOSFETs and the number 100 on top of the tall silver electrolytic capacitors.
This version ships with soldered stackable headers and terminal blocks. It includes a set of four M2.5 standoffs (11 mm length), screws, and nuts that can be used to secure the board at the proper height.
The M2H24v14 is also available as a kit with connectors included but not soldered in, or as a standalone board without connectors.
Terminal block warnings:
1) The 5mm blue terminal blocks are rated for up to 16 A, so for higher-current applications we recommend getting an unsoldered version and then soldering thick wires directly to the board.
2) The included terminal blocks are taller than the headers, so precautions must be taken when stacking multiple Motoron M2H modules assembled with 5mm terminal blocks. As shown in the picture below, the terminal block pins should be trimmed, and the nuts included with the standoffs can be used as extra spacers.
|
Two Motoron M2H boards with terminal blocks can be stacked if you trim the leads on the terminal blocks and space out each board using hex nuts in addition to the 11mm standoffs. |
|---|
|
Motoron M2H Dual High-Power Motor Controller for Raspberry Pi pinout. |
|---|
|
Two Motoron M2H shields stacked on a Raspberry Pi. |
|---|
The MOSFETs can handle large current spikes for short durations (e.g. 100 A for a few milliseconds), and the driver’s current chopping will keep the average current under the set limit. The peak ratings are for quick transients (e.g. when a motor is first turned on), and the continuous rating is dependent on various conditions, such as the ambient temperature. PWMing the motor will introduce additional heating proportional to the frequency. The actual current you can deliver will depend on how well you can keep the motor driver cool. The driver’s printed circuit board is designed to draw heat out of the MOSFETs, but performance can be improved by adding a heat sink or air flow. For high-current installations, the motor and power supply wires should also be soldered directly instead of going through the 5mm blue terminal blocks, which are rated for up to 16 A.
Warning: This motor driver has no over-temperature shut-off. An over-temperature or over-current condition can cause permanent damage to the motor driver. You might consider using either the Motoron’s current sense or an external current sensor to monitor your current draw.
This product can get hot enough to burn under normal operating conditions. Take care when handling this product and other components connected to it.
The tables below list the members of the Motoron family and show the key differences among them. Each type is available in several versions to provide different options for the through-hole connectors: they can be purchased as an assembled product with connectors soldered in, as a kit with connectors included but not soldered in, or (for Arduino and Raspberry Pi expansions) as a standalone board without connectors.
| Motoron motor controllers micro versions |
||||
 M1T550 M1U550 |
 M2T550 M2U550 |
 M1T256 M1U256 |
 M2T256 M2U256 |
|
|---|---|---|---|---|
| Control interface: | I²C or UART serial | |||
| Motor channels: | 1 (single) | 2 (dual) | 1 (single) | 2 (dual) |
| Minimum motor supply voltage: |
1.8 V | 4.5 V | ||
| Absolute max motor supply voltage: |
22 V | 48 V | ||
| Recommended max nominal battery voltage: |
16 V | 36 V | ||
| Max continuous current per channel: |
1.8 A | 1.6 A | 2.2 A | 1.8 A |
| Logic voltage range: | 3.0 V to 4.9 V(1) | 3.0 V to 5.5 V | ||
| Current sensing/limiting: | – | – | – | – |
| Available versions with I²C: |
||||
| Available verions with UART serial: |
||||
| Price: | $12.49 – $14.49 | $15.95 – $17.95 | $16.95 – $18.95 | $23.95 – $25.95 |
| 1 The M1x550 and M2x550 are not recommended for use with 5V nominal logic. | ||||
| Motoron motor controllers Arduino and Raspberry Pi form factor versions |
||||||
 M3S550  M3H550 |
 M3S256  M3H256 |
 M2S24v14 M2H24v14 |
 M2S24v16 M2H24v16 |
 M2S18v18 M2H18v18 |
 M2S18v20 M2H18v20 |
|
|---|---|---|---|---|---|---|
| Control interface: | I²C | |||||
| Motor channels: | 3 (triple) | 2 (dual) | ||||
| Minimum motor supply voltage: |
1.8 V | 4.5 V | 6.5 V | |||
| Absolute max motor supply voltage: |
22 V | 48 V | 40 V | 30 V | ||
| Recommended max nominal battery voltage: |
16 V | 36 V | 28 V | 18 V | ||
| Max continuous current per channel: |
1.7 A | 2 A | 14 A | 16 A | 18 A | 20 A |
| Logic voltage range: | M3S550 3.1 V to 5.5 V |
3.0 V to 5.5 V | 3.0 V to 5.5 V | |||
| M3H550 3.0 V to 4.9 V(1) |
||||||
| Current sensing/limiting: | – | – | ||||
| Available versions for Arduino: |
M3S550 | M3S256 | M2S24v14 | M2S24v16 | M2S18v18 | M2S18v20 |
| Available versions for Raspberry Pi: |
M3H550 | M3H256 | M2H24v14 | M2H24v16 | M2H18v18 | M2H18v20 |
| Price: | $20.95 – $30.95 | $34.95 – $44.95 | $59.95 – $69.95 | $79.95 – $89.95 | $59.95 – $69.95 | $95.95 – $104.95 |
| 1 The M3H550 is not recommended for use with 5V nominal logic. | ||||||
| Size: | 65 mm × 56 mm |
|---|---|
| Weight: | 29 g1 |
| Channels: | 2 |
|---|---|
| Model: | Motoron M2H24v14 |
| Control interface: | I²C |
| Minimum operating voltage: | 6.5 V |
| Maximum operating voltage: | 40 V2 |
| Continuous output current per channel: | 14 A3 |
| Minimum logic voltage: | 3.0 V |
| Maximum logic voltage: | 5.5 V |
| Reverse voltage protection?: | Y |
| Connectors soldered?: | Y |
| PCB dev codes: | mc2h31a |
|---|---|
| Other PCB markings: | 0J13656 |

User’s manual for the Pololu Motoron Motor Controllers.
This file contains 3D models (in the step file format) of the Motoron M2H Dual High-Power Motor Controllers for Raspberry Pi.
This DXF drawing shows the locations of all of the board’s holes.
No FAQs available.

We’ve expanded our Motoron series of motor controllers with some dual high-power motor controllers: the Motoron M2S family for Arduino and Motoron...