

This is a merged information page for Item #3576.
View normal product page.
Pololu item #:
3576
Brand:
Pololu
Status:
Active and Preferred

This is the control board for the Balboa 32U4 robot. It is included as part of the Balboa 32U4 Balancing Robot Kit and can be added to the Balboa Chassis with Stability Conversion Kit to turn into a Balboa 32U4 robot.
 Compare all products in Balboa Robot and Accessories.
Compare all products in Balboa Robot and Accessories.
|
Balboa 32U4 Balancing Robot control board. |
|---|
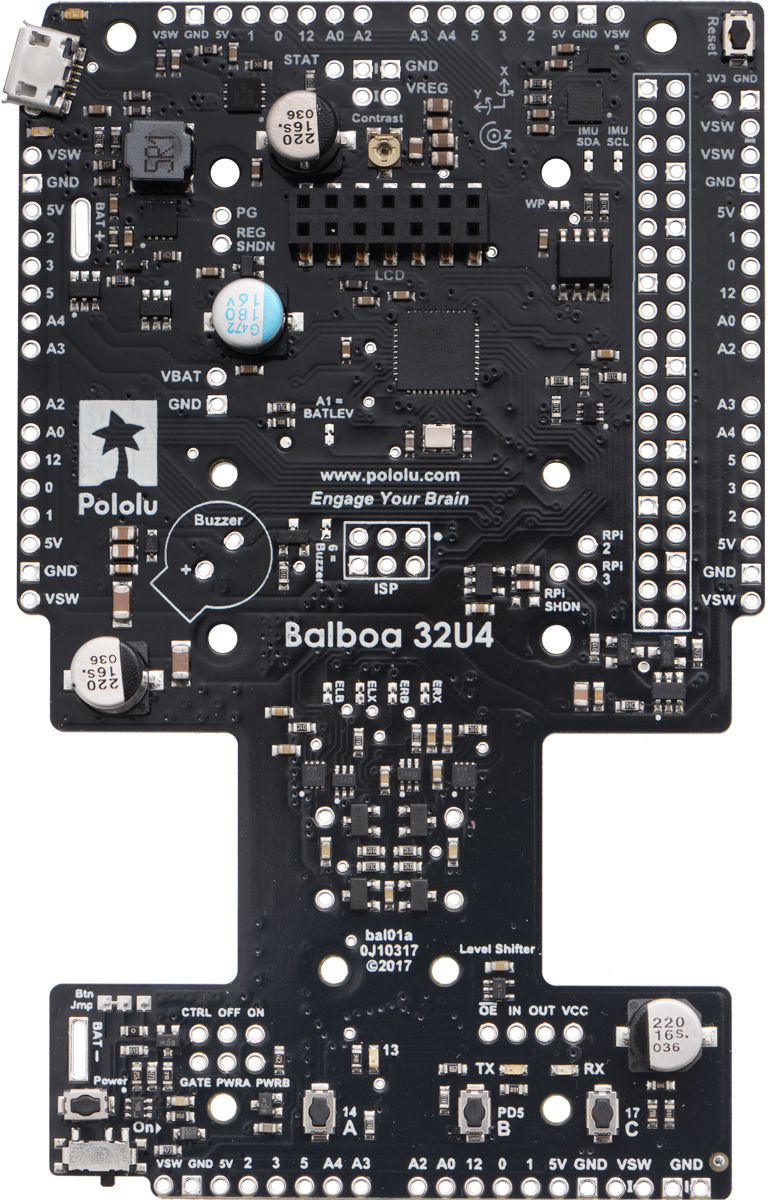 |
Balboa 32U4 Balancing Robot control board. |
|---|
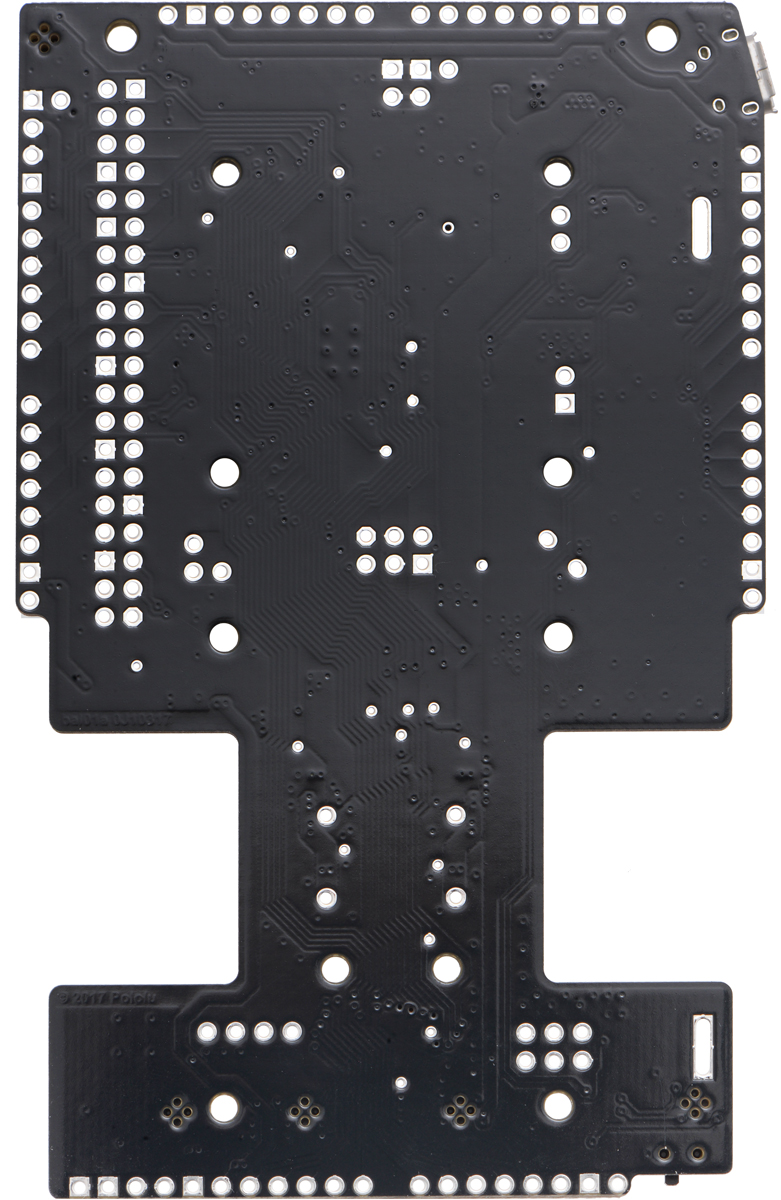 |
Balboa 32U4 Balancing Robot control board, bottom view. |
|---|
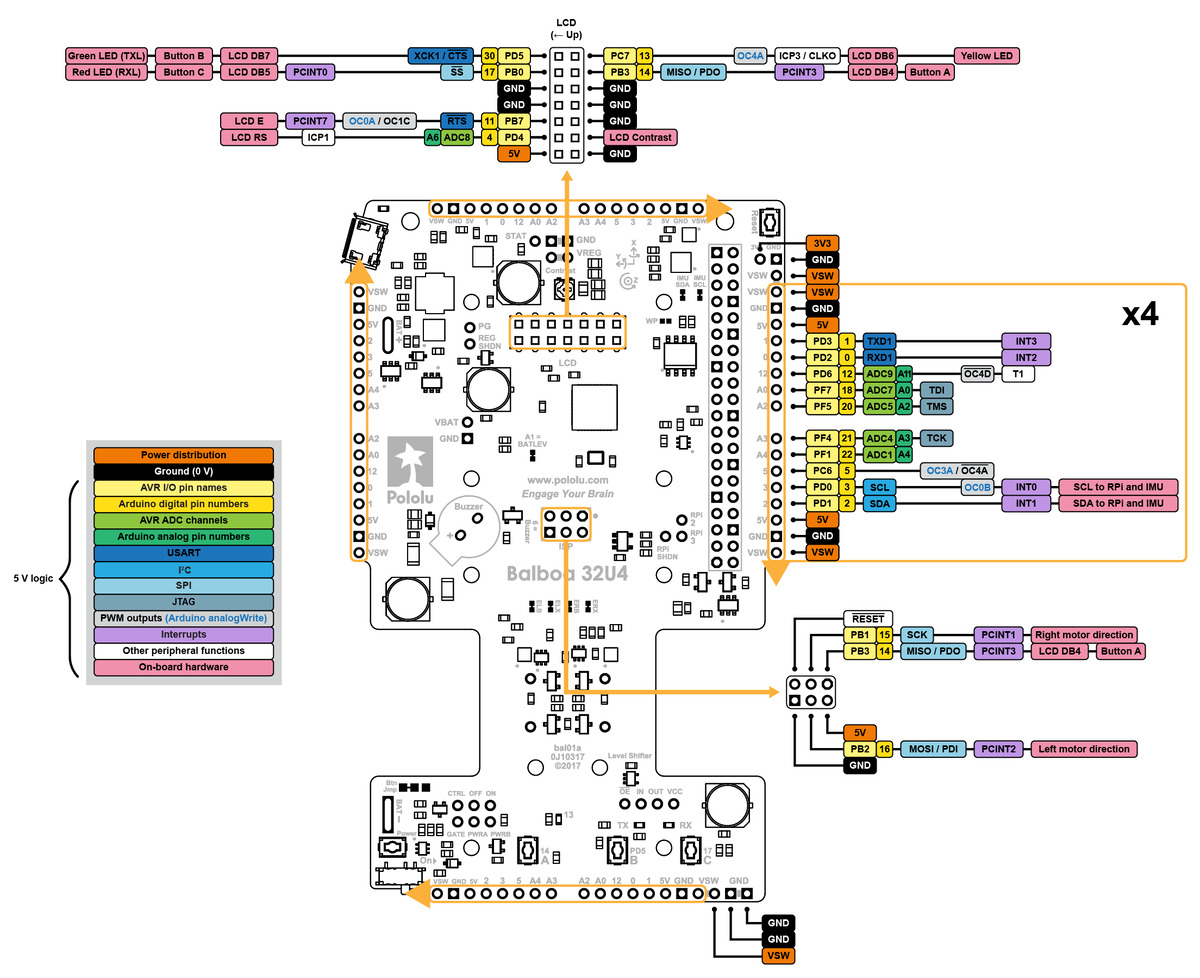 |
Pinout diagram of the Balboa 32U4 control board (ATmega32U4 pinout and peripherals). |
|---|
 |
Pinout diagram of the Balboa 32U4 control board (Raspberry Pi pinout and peripherals, level shifter, and board power control). |
|---|
 |
Power distribution diagram of the Balboa 32U4 control board. |
|---|
 |
The Balboa 32U4’s IMU and compass chips. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
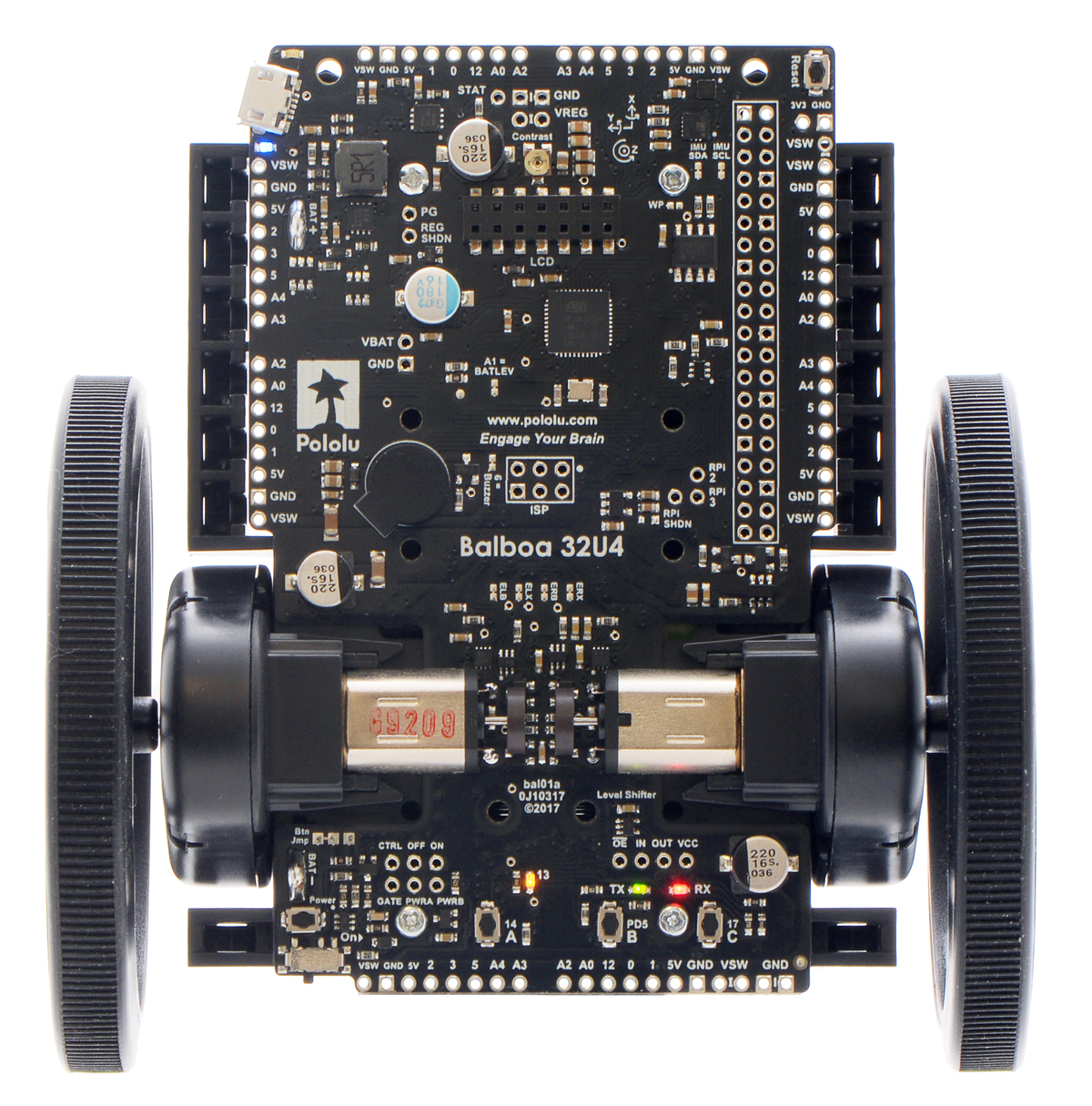 |
Balboa 32U4 Balancing Robot with 80×10mm wheels. |
|---|
 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and LCD. |
|---|
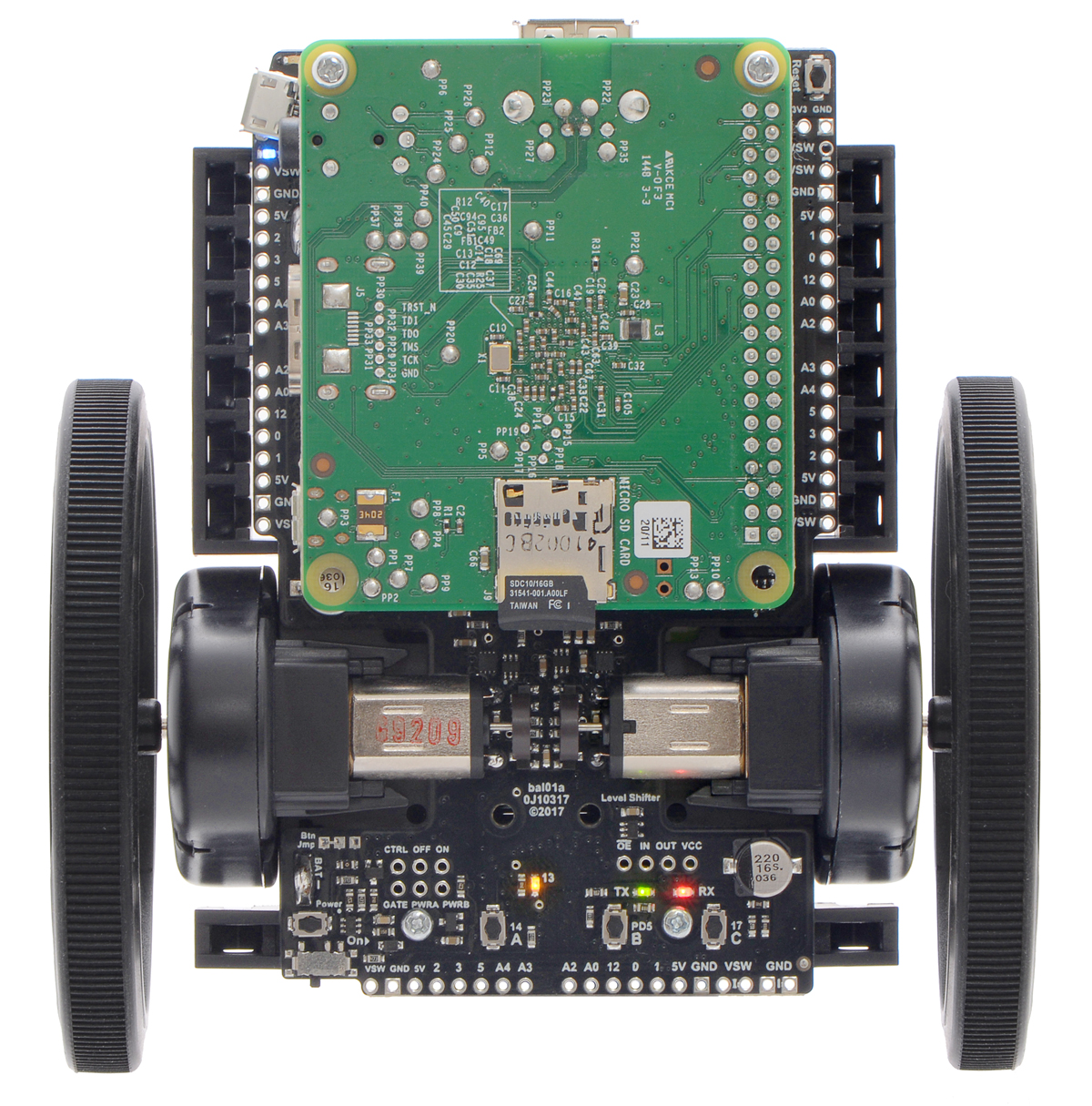 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and a Raspberry Pi 1 Model A+. |
|---|
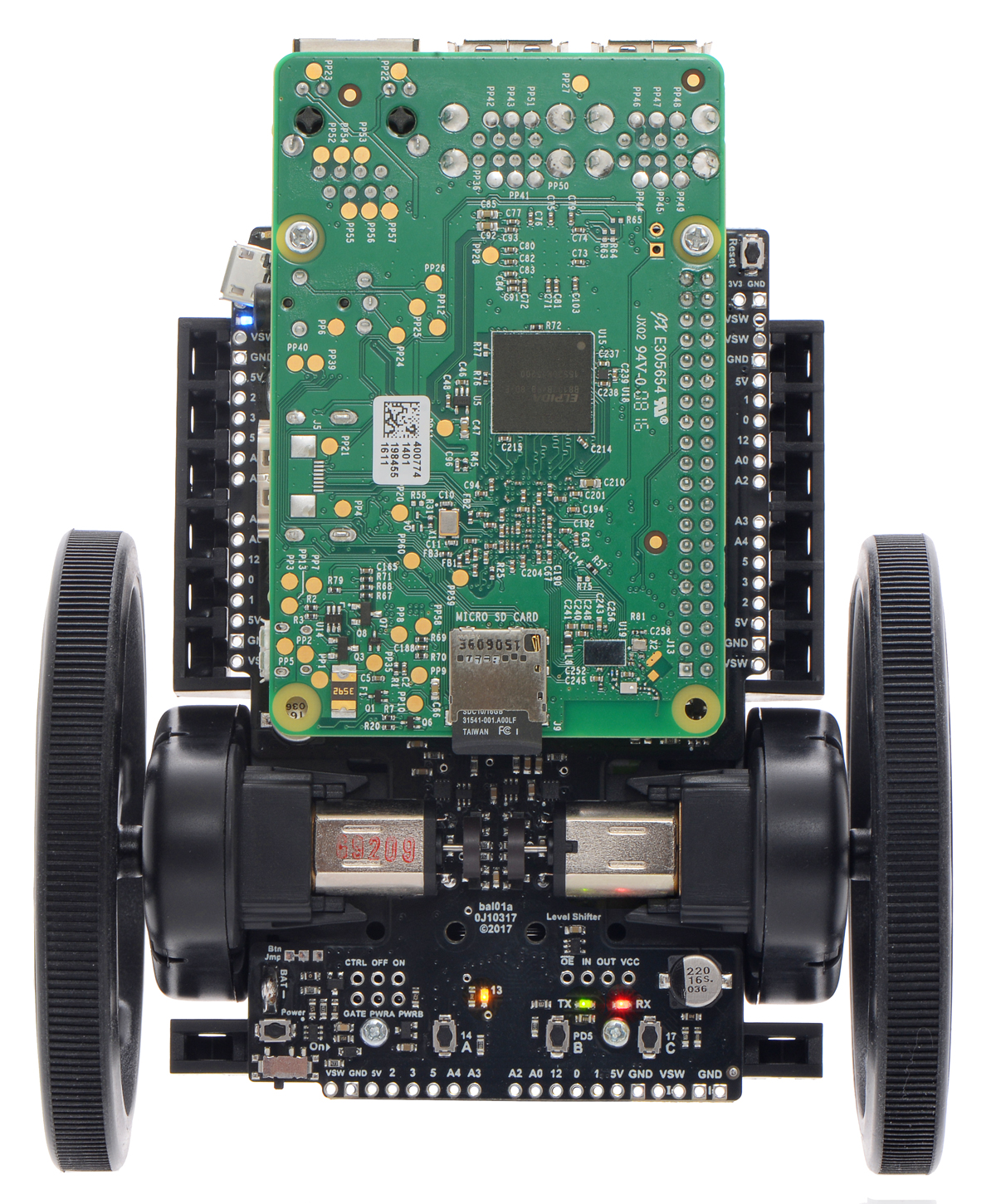 |
Balboa 32U4 Balancing Robot with 80×10mm wheels and a Raspberry Pi 3 Model B. |
|---|
This is primarily intended as a replacement part for the Balboa 32U4 Balancing Robot, but it can also be combined with the Balboa Chassis with Stability Conversion Kit to make your own Balboa 32U4 robot. This product consists of the Balboa 32U4 control board PCB shown in the main product picture along with the following additional parts:
See the Balboa user’s guide for assembly instructions.
|
|
| PCB dev codes: | bal01a |
|---|---|
| Other PCB markings: | 0J10317 |

User’s manual for the Pololu Balboa 32U4 balancing robot.
This download contains the Windows drivers for the A-Star 32U4 and the rest of our 32U4 family of boards.
Note: this model includes an LCD and headers that are sold separately from the Balboa 32U4 Balancing Robot Kit.
This DXF drawing shows the locations of all of the board’s holes.
Datasheet for the ST LSM6DS33 3D accelerometer and 3D gyroscope.
Datasheet for the ST LIS3MDL 3-axis magnetometer.
The Balboa32U4 library for the Arduino IDE helps interface with the on-board hardware on the Balboa 32U4 control board as well as the optional 5-channel reflectance sensor array for the Balboa.
An Arduino library for interfacing with the LSM6DSO and LSM6DS33 accelerometer and gyro ICs.
An Arduino library for interfacing with the LIS3MDL magnetometer.
Pololu forum user Jim Remington has shared a technique for compensating for hard iron distortion of the Balboa’s magnetometer. After corrections, he was able to create a compass program with a basic accuracy of ±2°, sufficient for navigating the Balboa around the room.
No FAQs available.
No blog posts to show.