

This is a merged information page for Item #3544.
View normal product page.
Pololu item #:
3544
Brand:
Pololu
Status:
Active and Preferred

The Romi 32U4 Control Board turns the Romi chassis into a programmable robot based on the Arduino-compatible ATmega32U4 MCU. Its features include integrated dual motor drivers, a versatile power circuit, and inertial sensors, as well as connections for quadrature encoders and an optional LCD. The board also has the ability to interface with an added Raspberry Pi, making the foundation for a complete Raspberry Pi-controlled Romi robot.
 Compare all products in Romi Chassis and Accessories or Raspberry Pi Expansion Boards or Robot Kits with Soldering.
Compare all products in Romi Chassis and Accessories or Raspberry Pi Expansion Boards or Robot Kits with Soldering.
|
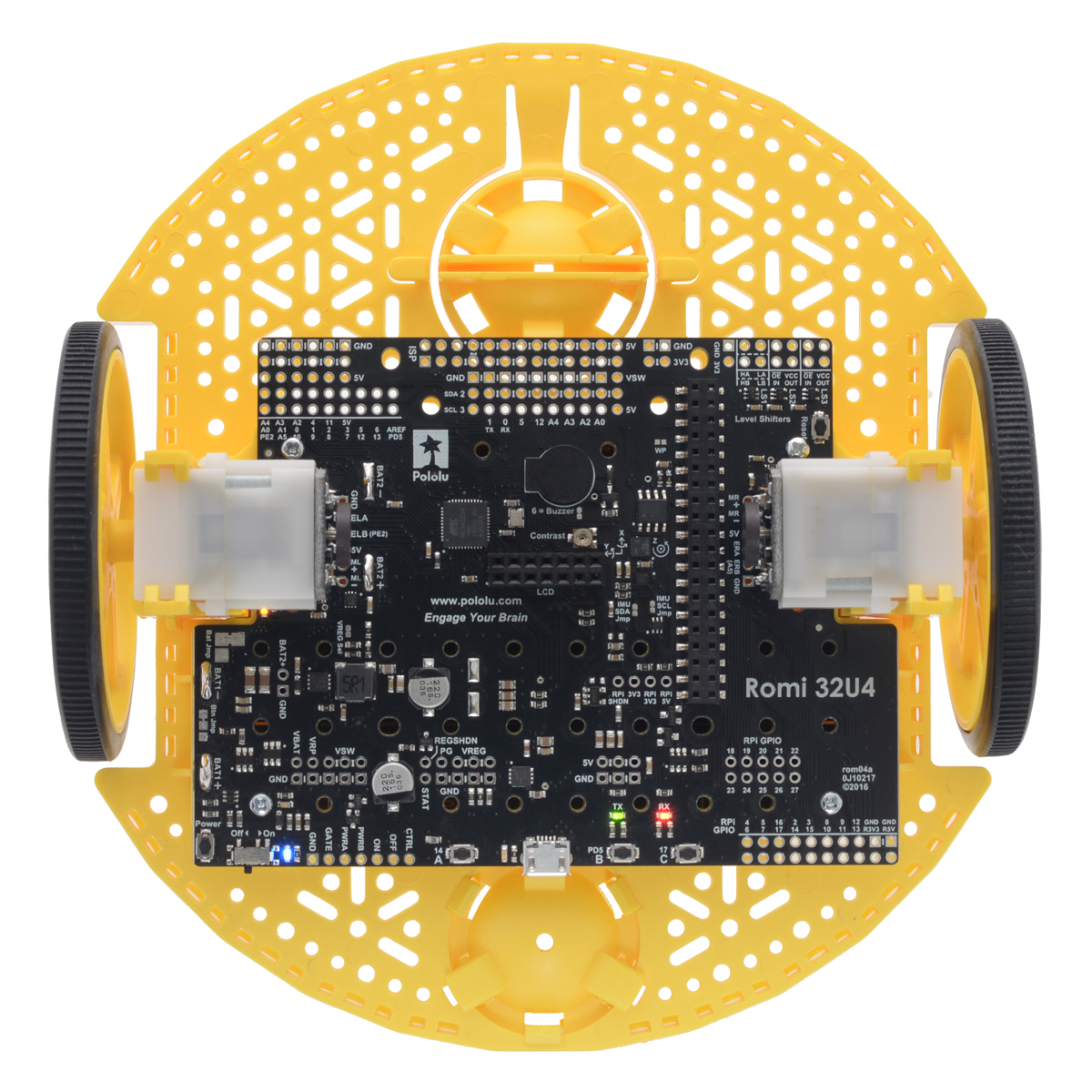
Romi 32U4 Control Board. |
|---|
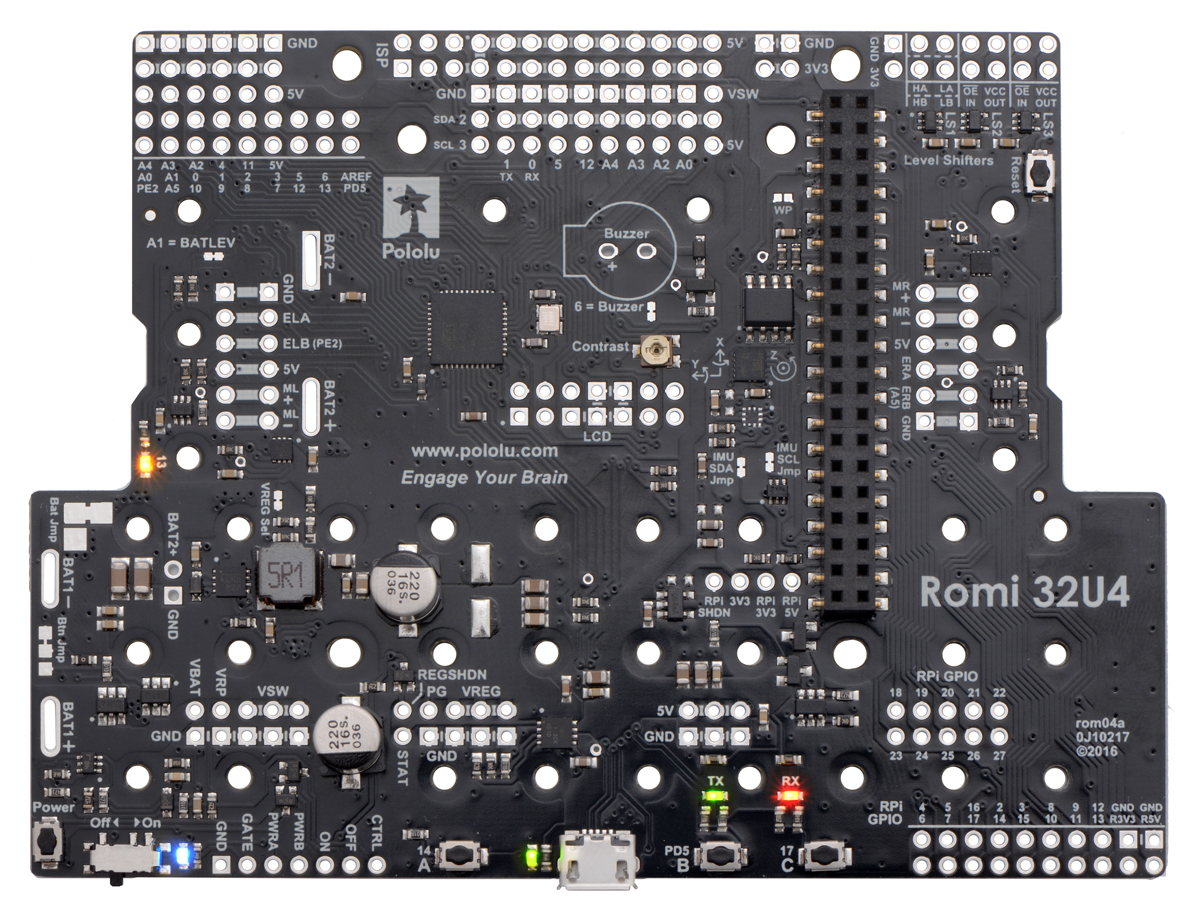 |
Romi 32U4 Control Board, top view. |
|---|
 |
Romi 32U4 Control Board, bottom view. |
|---|
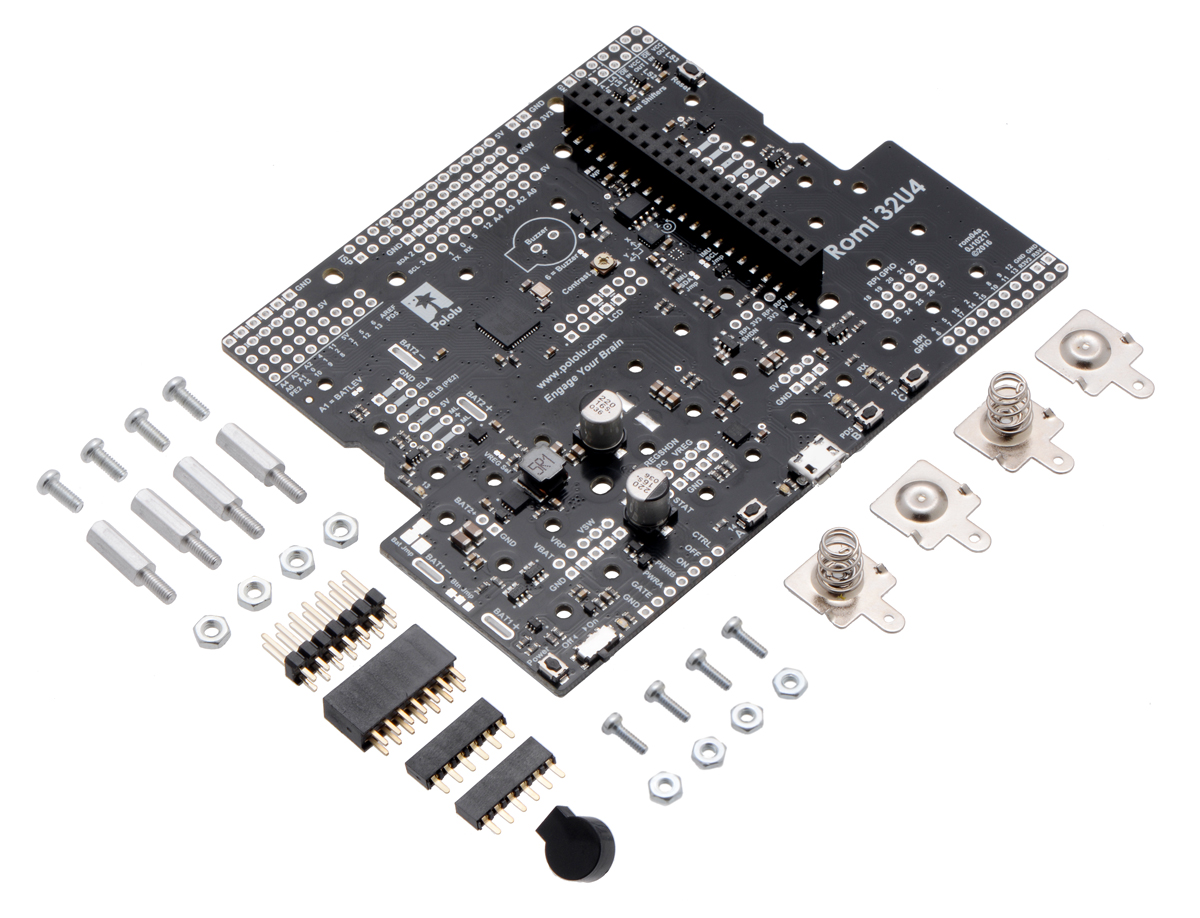 |
Romi 32U4 Control Board, shown with included hardware. |
|---|
 |
Romi 32U4 Control Board, top view with dimensions. |
|---|
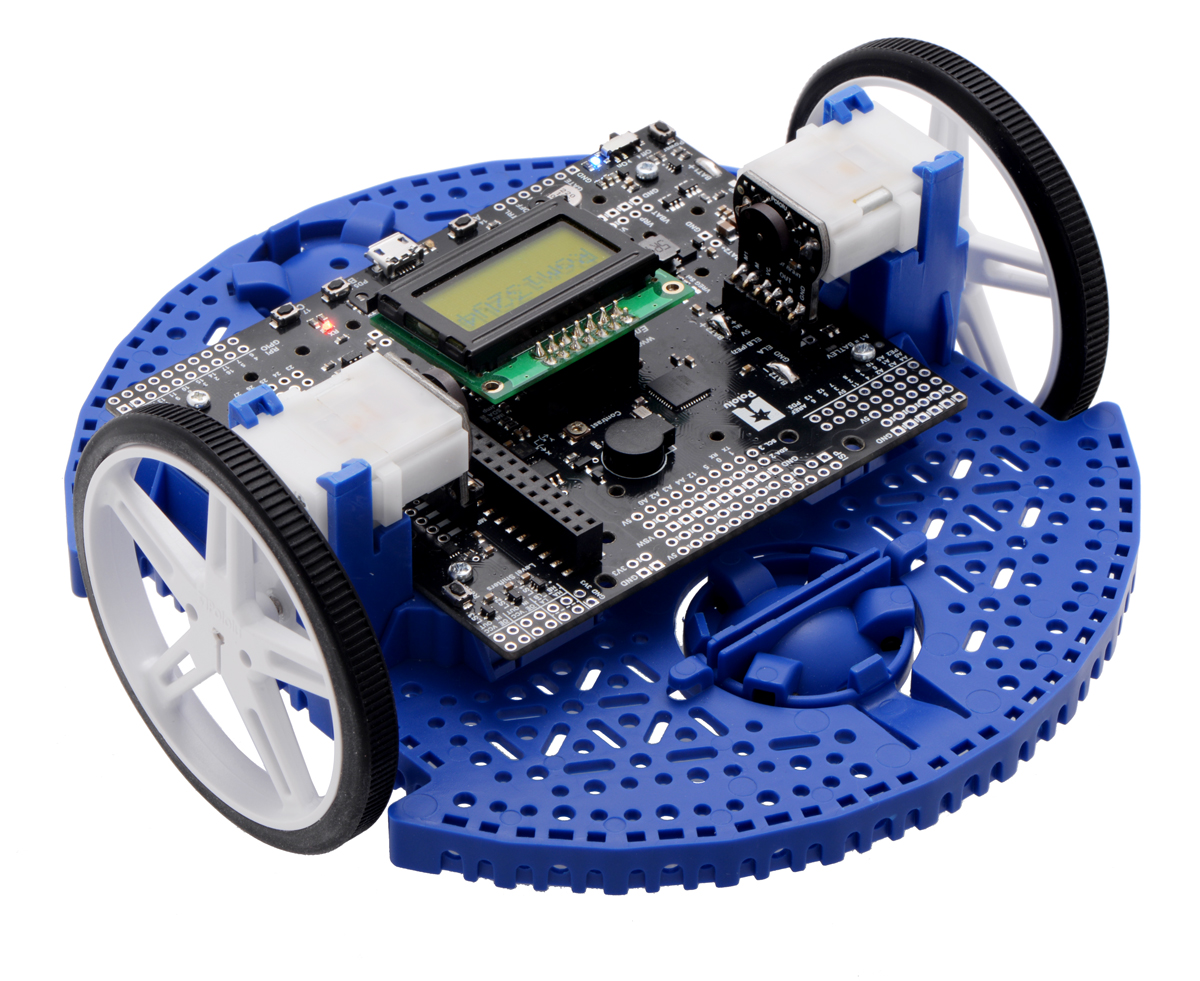 |
Romi 32U4 Control Board with LCD on a Romi chassis. |
|---|
 |
Romi 32U4 Control Board on a Romi chassis, top view. |
|---|
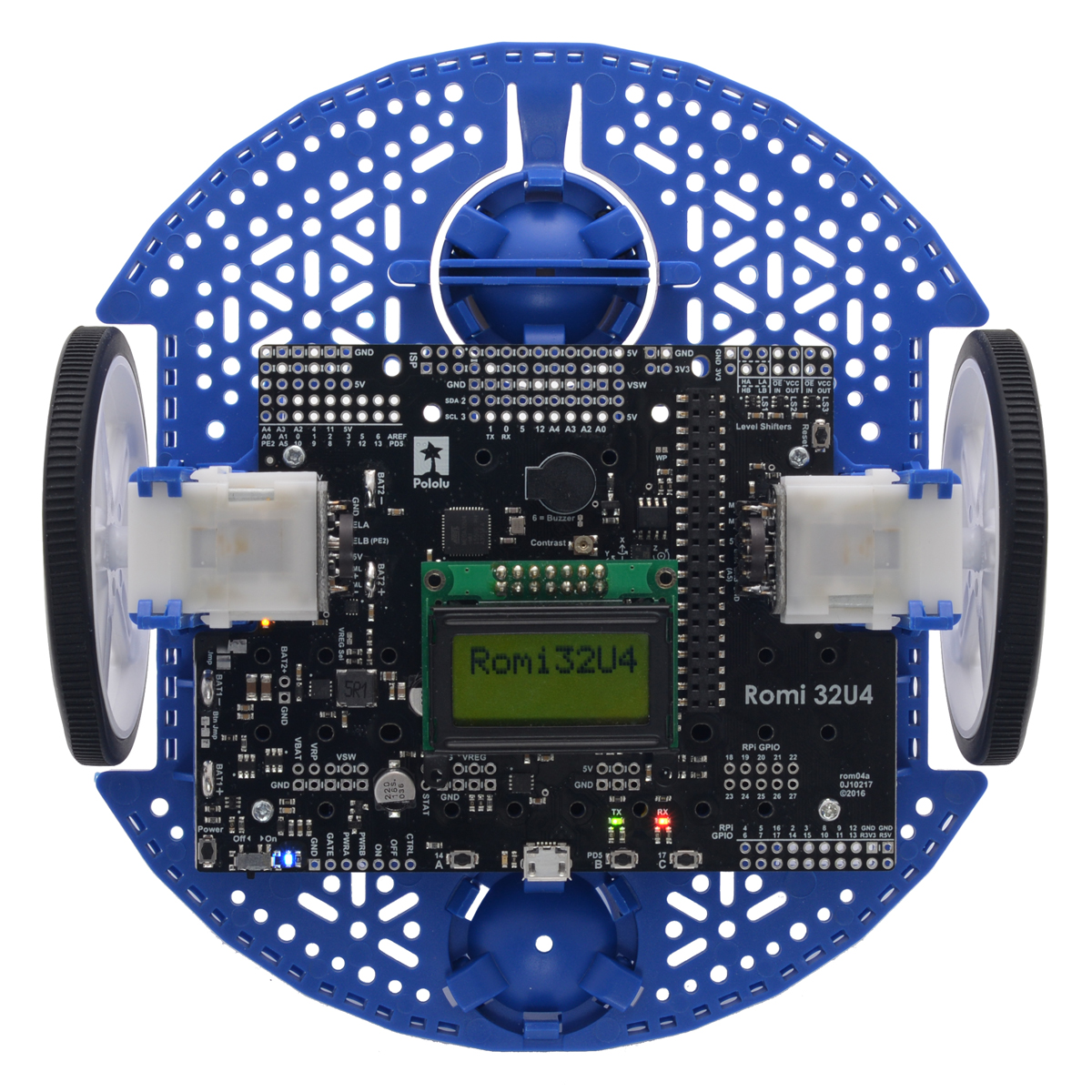 |
Romi 32U4 Control Board with LCD on a Romi chassis, top view. |
|---|
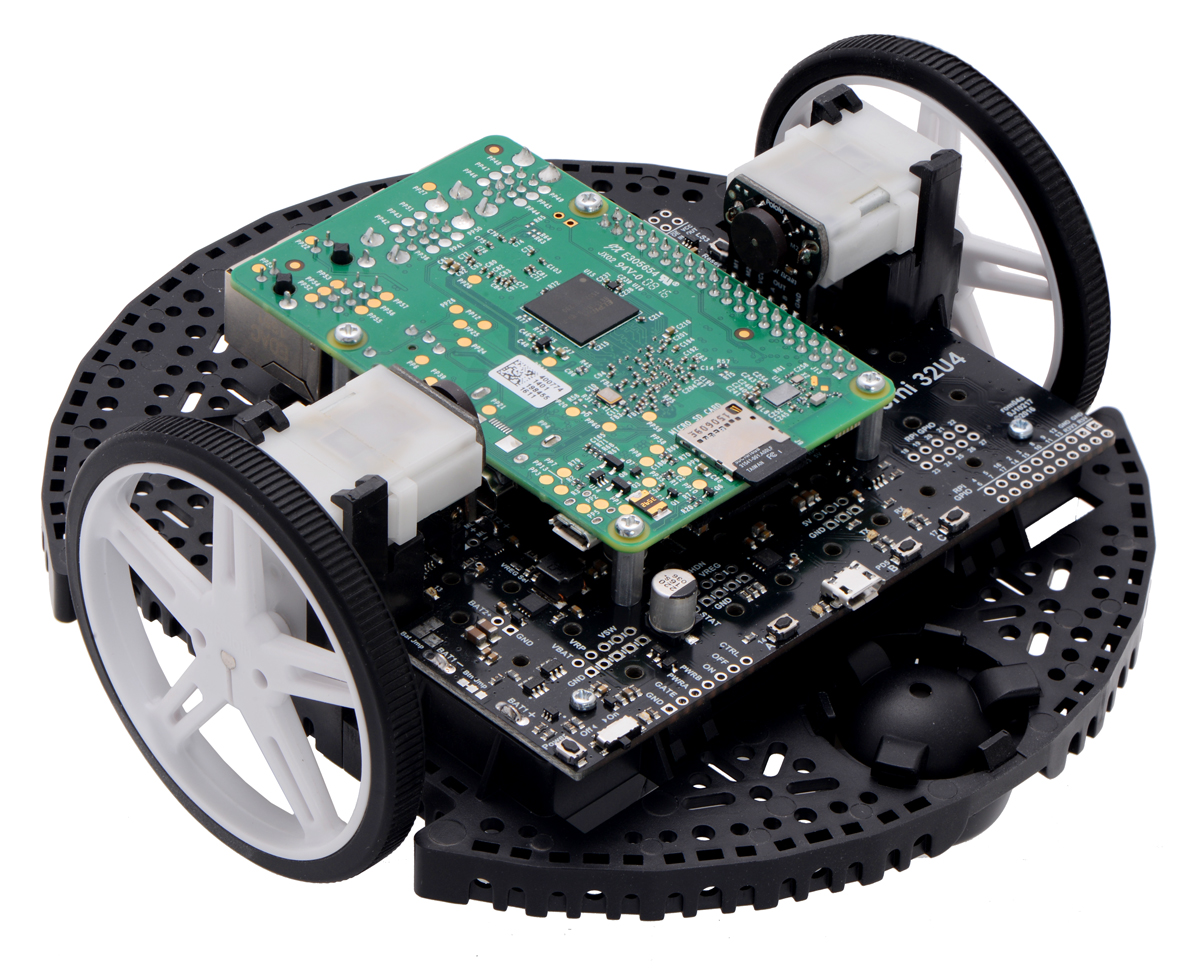 |
Romi 32U4 Control Board with Raspberry Pi on a Romi chassis. |
|---|
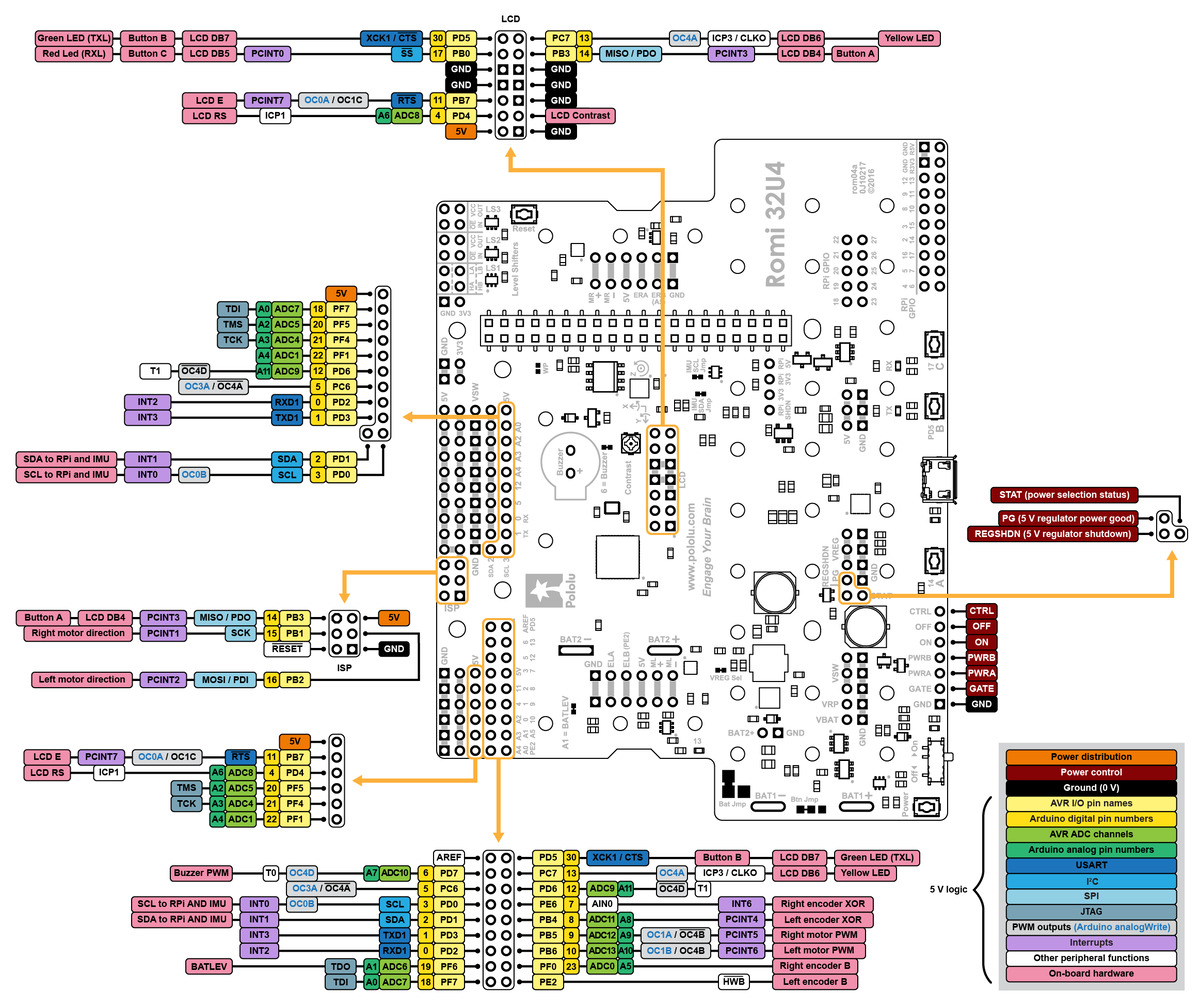 |
Pinout diagram of the Romi 32U4 Control Board (ATmega32U4 pinout, peripherals, and board power control). |
|---|
 |
Pinout diagram of the Romi 32U4 Control Board (Raspberry Pi pinout, peripherals, and level shifters). |
|---|
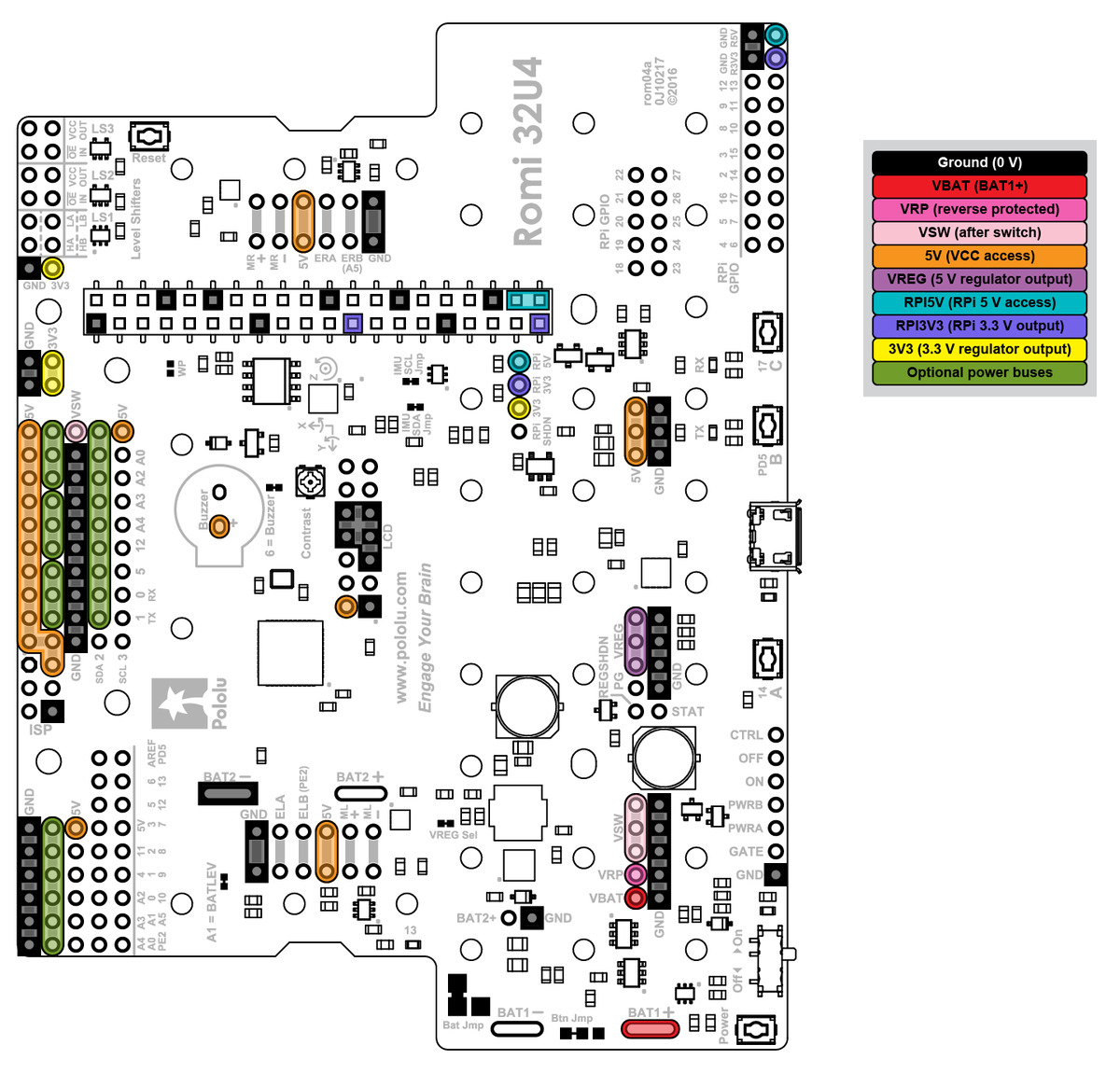 |
Power distribution diagram of the Romi 32U4 Control Board. |
|---|
|
The Romi 32U4 Control Board is designed to be assembled with a Romi chassis to create a capable integrated robot platform that can easily be programmed and customized.
Like our A-Star 32U4 programmable controllers, the Romi 32U4 Control Board is built around a USB-enabled ATmega32U4 AVR microcontroller from Microchip (formerly Atmel), and it ships preloaded with an Arduino-compatible bootloader. The control board features two H-bridge motor drivers and is designed to connect to a Romi Encoder Pair Kit (available separately) to allow closed-loop motor control. It also includes a powerful 5 V switching step-down regulator that can supply up to 2 A continuously, along with a versatile power switching and distribution circuit. A 3-axis accelerometer and gyro enable a Romi 32U4 robot to make inertial measurements, estimate its orientation, and detect external forces. Three on-board pushbuttons offer a convenient interface for user input, while indicator LEDs, a buzzer, and a connector for an optional LCD allow the robot to provide feedback.
|
|
The Romi 32U4 Control Board can be used either as a standalone control solution or as a base for a more powerful Raspberry Pi controller. Its on-board connector and mounting holes allow a compatible Raspberry Pi (Model B+ or newer, including Pi 3 Model B+ and Model A+) to plug directly into the control board. Integrated level shifters make it easy to set up I²C communication and interface other signals between the two controllers, and the control board automatically supplies 5 V power to an attached Raspberry Pi. In this setup, the Raspberry Pi can handle the high-level robot control while relying on the Romi 32U4 Control Board for low-level tasks, like running motors, reading encoders, and interfacing with other analog or timing-sensitive devices.
|
Romi 32U4 Control Board with Raspberry Pi on a Romi chassis. |
|---|
The I/O lines of both the ATmega32U4 and the Raspberry Pi are broken out to 0.1″-spaced through-holes along the front and rear of the control board, and the board’s power rails are similarly accessible, enabling sensors and other peripherals to easily be connected.
A software add-on is available that makes it easy to program a Romi 32U4 robot from the Arduino environment, and we have Arduino libraries and example sketches to help get you started. A USB A to Micro-B cable (not included) is required for programming.
|
The Romi 32U4 Control Board ships with all of its surface-mount components populated, and it includes a number of through-hole parts and mounting hardware, as shown in the picture above. Note that assembly (including soldering) is required; please see the user’s guide for assembly instructions.
The Romi chassis itself and other parts required to build a complete Romi 32U4 robot are not included; these are listed below, along with some optional additions.
To build a robot with the Romi 32U4 Control Board, you will need a few additional parts:
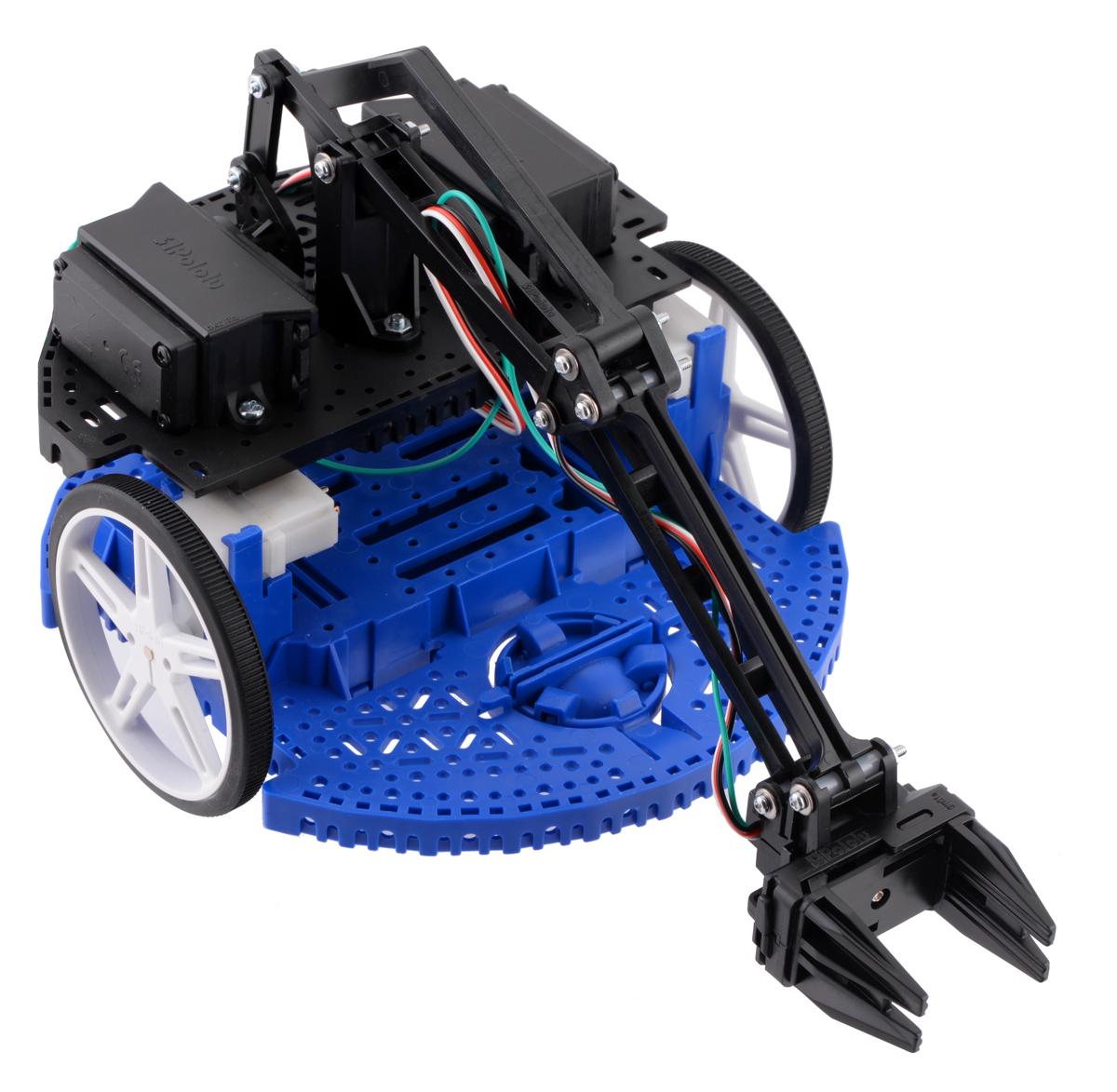 |
Romi arm with horizontal gripper orientation installed on a Romi. |
|---|
You might also consider getting these for your Romi 32U4 robot:
In addition to the Romi 32U4 Control Board, we have some more basic boards designed to mount onto a Romi chassis:
The Romi 32U4 Control Board uses the same microcontroller and includes many of the same features as some of our other programmable robots and controller boards. Consider these alternatives if you want similar electronics on a different chassis:
| Size: | 4.4″ × 3.3″ × 0.38″1 |
|---|---|
| Weight: | 35 g1 |
| Current rating: | 5 A2 |
|---|---|
| Processor: | ATmega32U4 @ 16 MHz |
| RAM size: | 2560 bytes |
| Program memory size: | 32 Kbytes3 |
| Motor driver: | DRV8838 |
| Motor channels: | 2 |
| Minimum operating voltage: | 2.5 V |
| Maximum operating voltage: | 10.8 V |
| Continuous output current per channel: | 1.8 A |
| Logic voltage: | 5 V |
| Reverse voltage protection?: | Y |
| External programmer required?: | N |
| PCB dev codes: | rom04a |
|---|---|
| Other PCB markings: | 0J10217 |

User’s manual for the Pololu Romi 32U4 Control Board.
This download contains the Windows drivers for the A-Star 32U4 and the rest of our 32U4 family of boards.
Note: this model includes an LCD that is sold separately from the Romi 32U4 Control Board.
This DXF drawing shows the locations of all of the board’s holes.
Datasheet for the ST LSM6DS33 3D accelerometer and 3D gyroscope.
The Romi32U4 library for the Arduino IDE helps interface with the on-board hardware on the Romi 32U4 Control Board.
An Arduino library for interfacing with the LSM6DSO and LSM6DS33 accelerometer and gyro ICs.
Arduino integrated development environment (IDE) software
This repository contains Arduino add-on files, Windows drivers, and bootloaders for the A-Star 328PB, A-Star 32U4, and the rest of our 32U4 family of boards.
Microchip’s product page for the ATmega32U4 AVR microcontroller, with links to its datasheet, application notes, and other resources.
No FAQs available.

A few weeks ago I posted a tutorial on building a Raspberry Pi robot with the Romi 32U4 Control Board and Romi Chassis. Now we have a short video...
This tutorial shows how to build a basic Raspberry Pi robot with the Romi chassis and the Romi 32U4 Control Board, our Arduino-compatible...

What do you need to turn a Romi chassis into a functioning robot? Here are some Romi projects from the community, as well a couple of our example...