This is a merged information page for Item #3081.
View normal product page.
Pololu item #:
3081
Brand:
Pololu
Status:
Active

Add quadrature encoders to your micro metal gearmotors (extended back shaft version required) with this kit that uses a magnetic disc and Hall effect sensors to provide 12 counts per revolution of the motor shaft. The sensors operate from 2.7 V to 18 V and provide digital outputs that can be connected directly to a microcontroller or other digital circuit. These encoders have their pins arranged as through-holes on a 2mm pitch, and wires or 2mm-pitch connectors must be soldered in to use them. This module is compatible with all of the dual-shaft micro metal gearmotors we carry, including the HPCB versions.
Alternatives available with variations in these parameter(s): connector Select variant…
 Compare all products in Encoders for Micro Metal Gearmotors.
Compare all products in Encoders for Micro Metal Gearmotors.
|
Magnetic Encoder Pair Kit for Micro Metal Gearmotors, 12 CPR, 2.7-18V (HPCB compatible). |
|---|
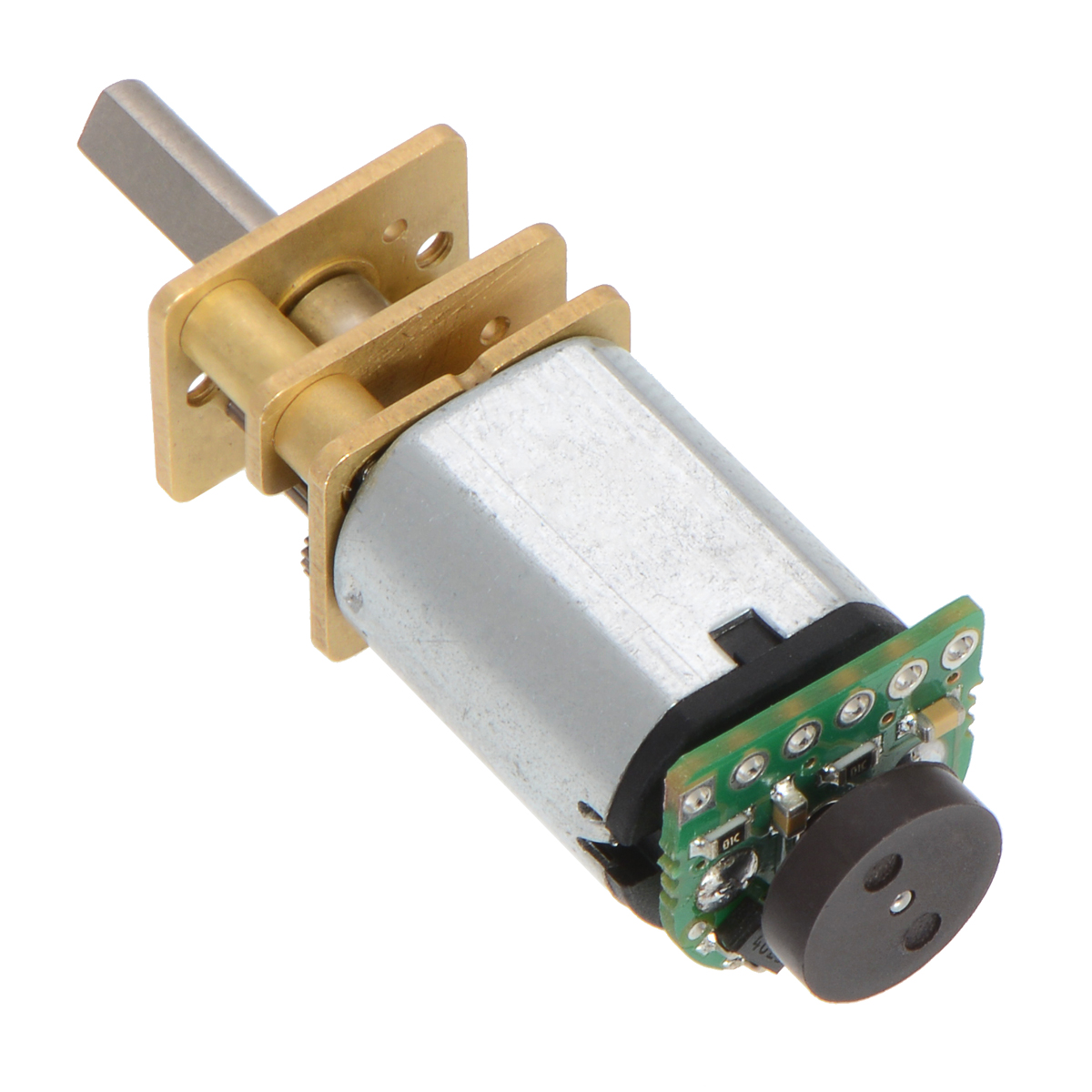 |
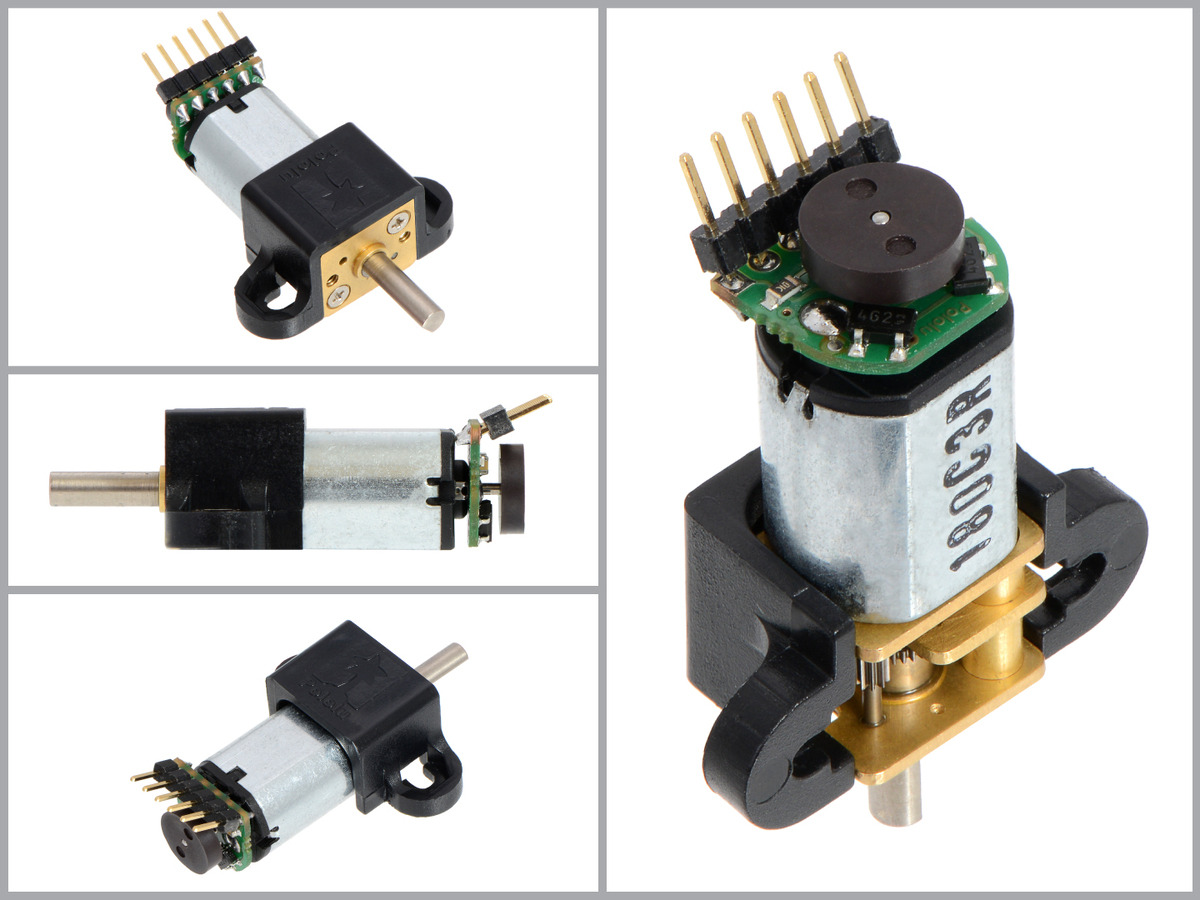
Magnetic Encoder Kit for Micro Metal Gearmotors assembled on a micro metal gearmotor with extended motor shaft. |
|---|
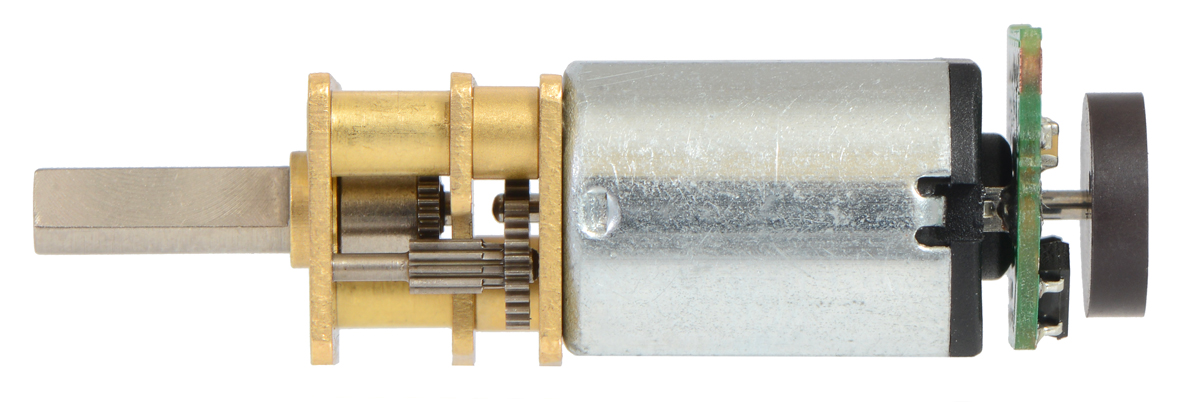 |
Magnetic Encoder Kit for Micro Metal Gearmotors assembled on a micro metal gearmotor with extended motor shaft. |
|---|
 |
Magnetic Encoder Kit for Micro Metal Gearmotors assembled on a micro metal gearmotor with extended motor shaft. |
|---|
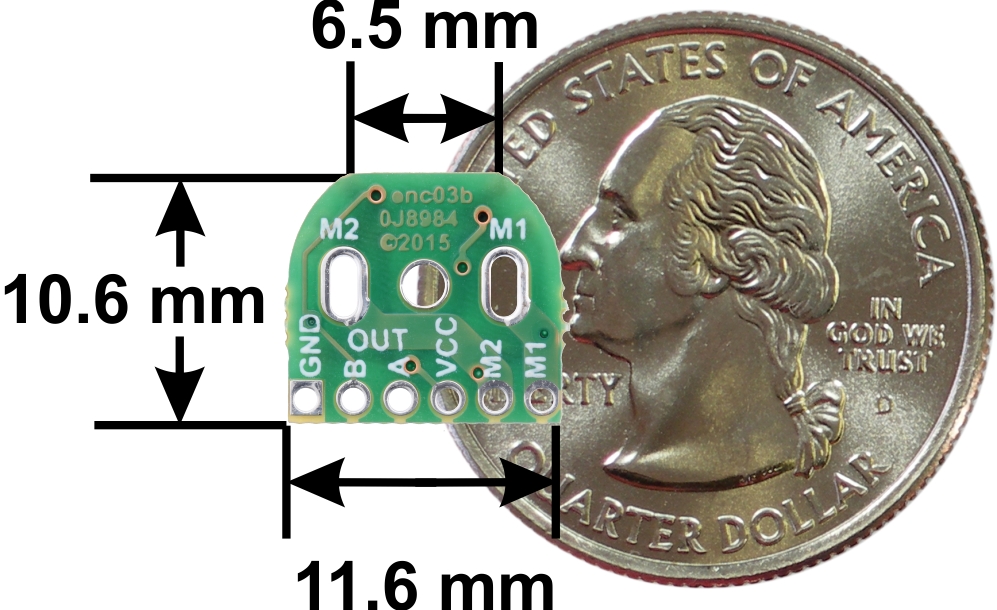 |
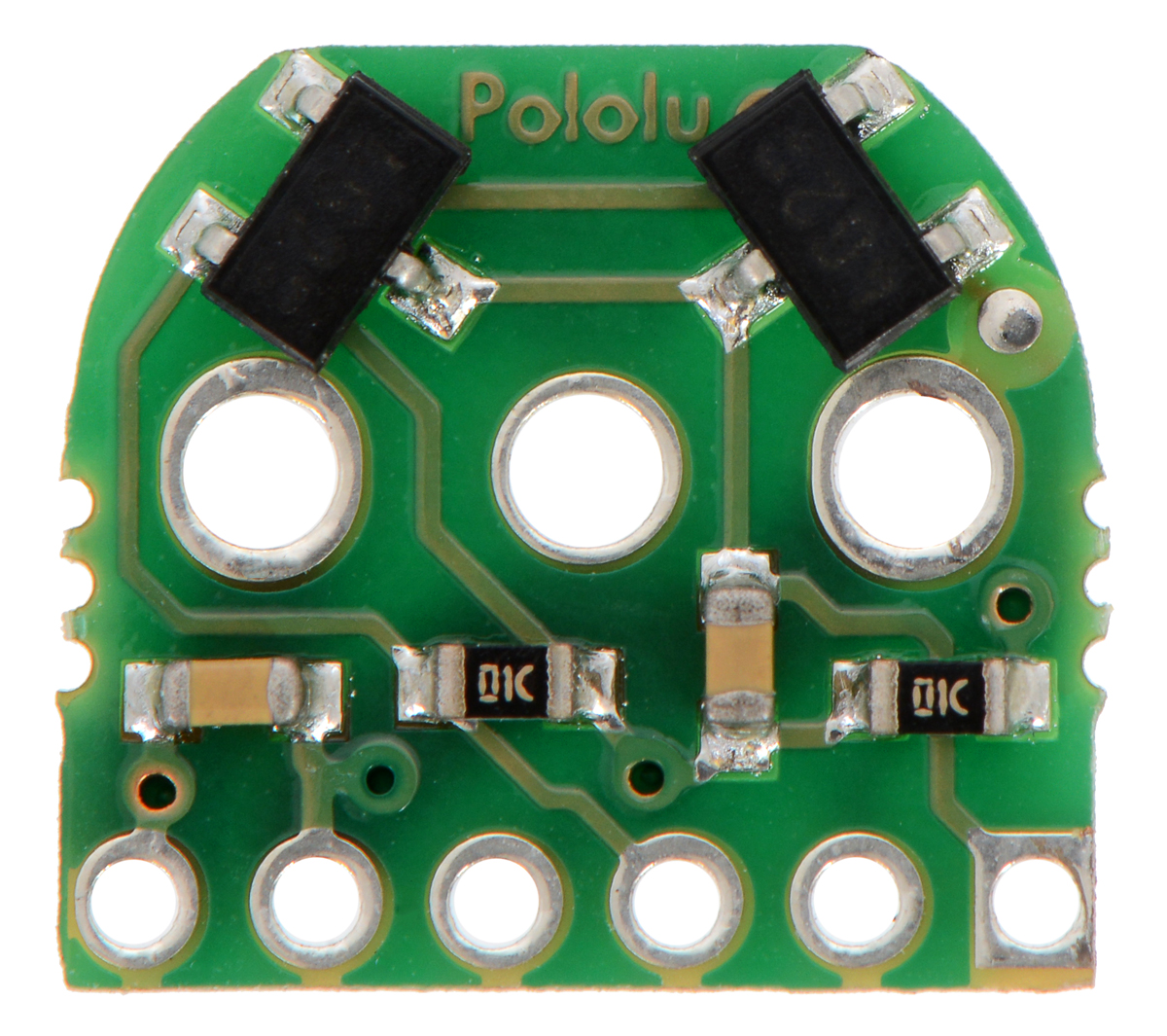
Magnetic Encoder Kit for Micro Metal Gearmotors, 12 CPR, 2.7-18V (HPCB compatible), motor-side view of PCB with dimensions |
|---|
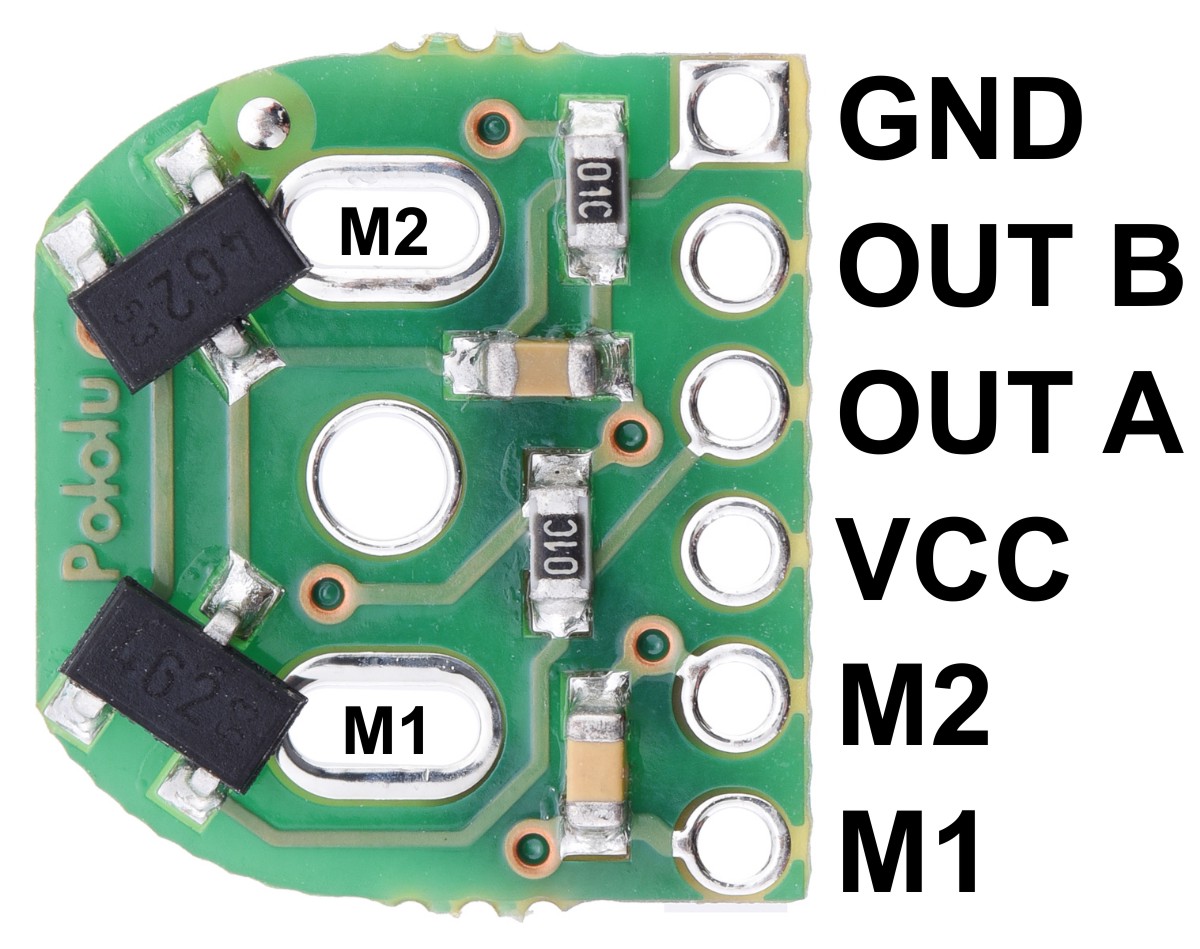 |
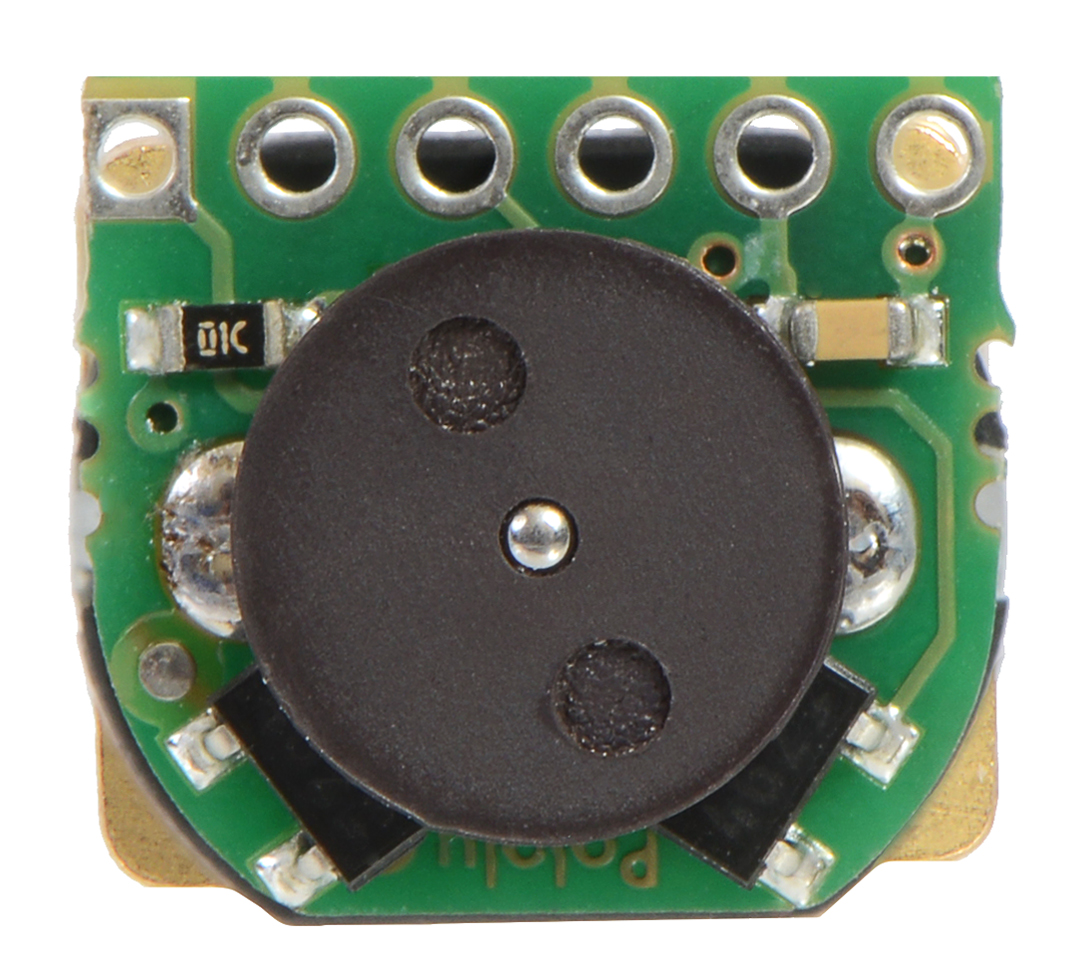
Magnetic Encoder Kit for Micro Metal Gearmotors (HPCB compatible), magnet-side view of PCB with labeled pinout. |
|---|
 |
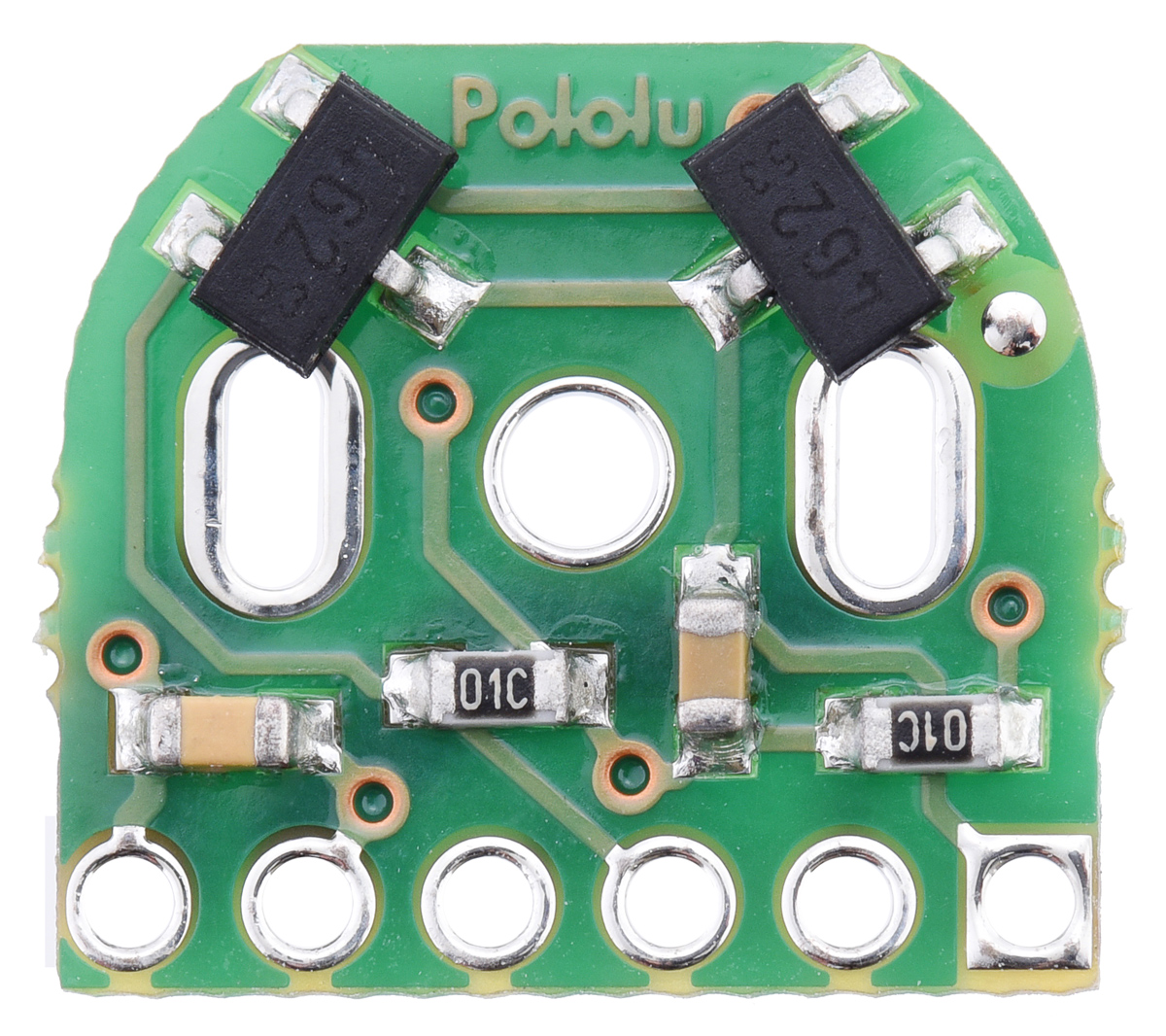
Magnetic Encoder Kit for Micro Metal Gearmotors (HPCB compatible), motor-side view of PCB. |
|---|
 |
Magnetic Encoder Kit for Micro Metal Gearmotors (HPCB compatible). |
|---|
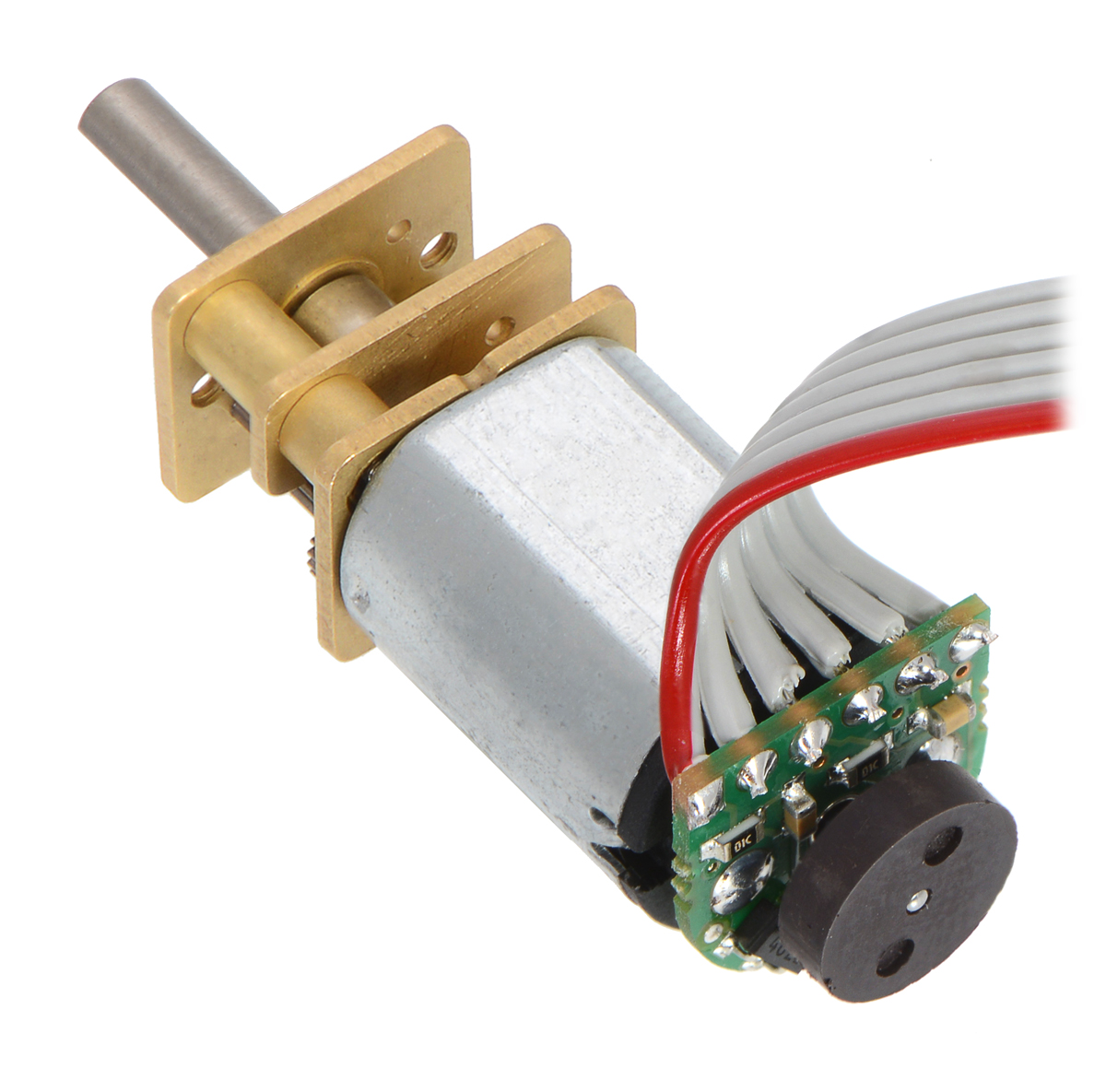 |
Magnetic Encoder on a Micro Metal Gearmotor with Extended Motor Shaft, assembled with ribbon cable wires. |
|---|
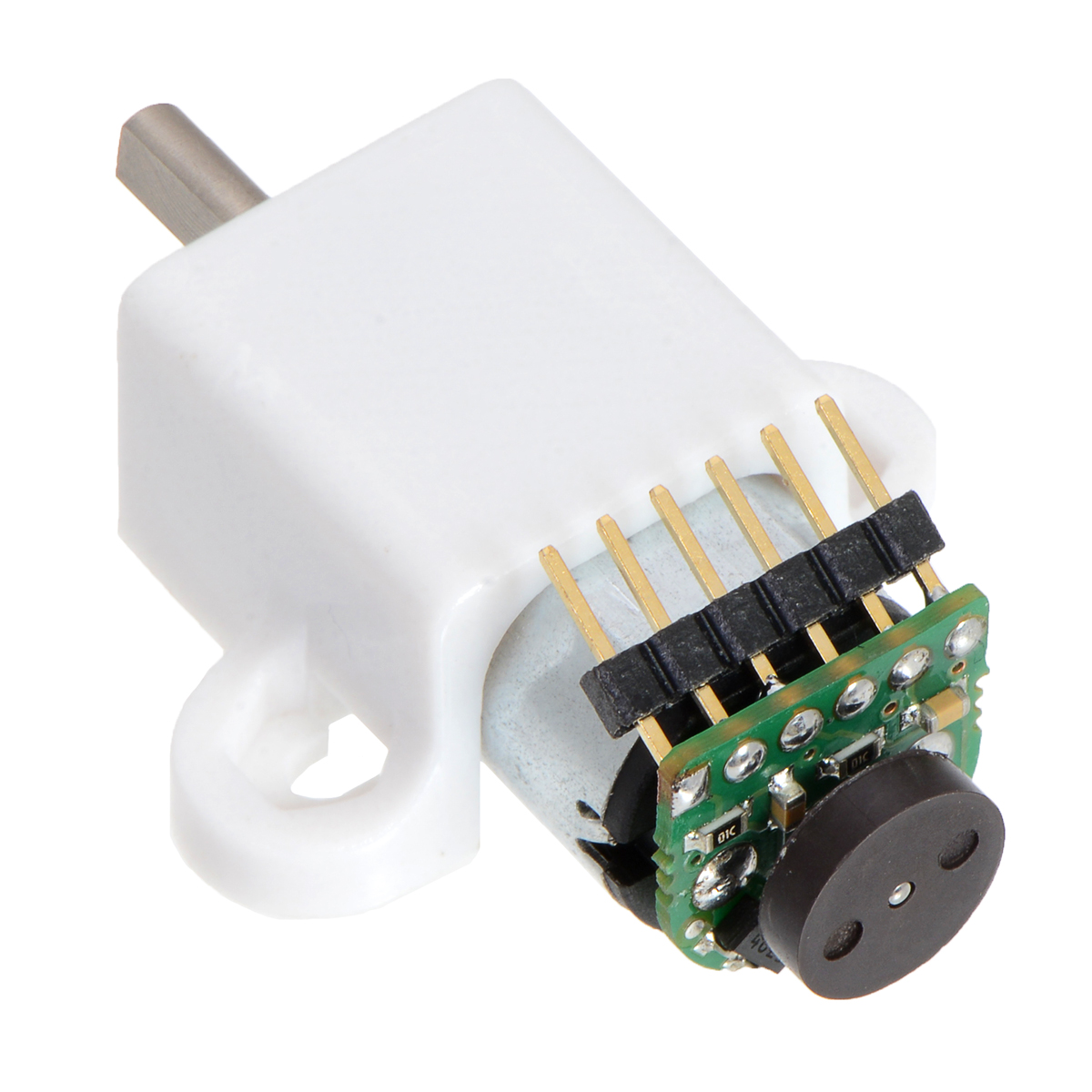 |
Magnetic Encoder Kit for Micro Metal Gearmotors assembled with 2mm-pitch male header pins installed over the motor. |
|---|
 |
Magnetic Encoder Kit for Micro Metal Gearmotors assembled with 2mm-pitch male header pins installed over the magnetic disc. |
|---|
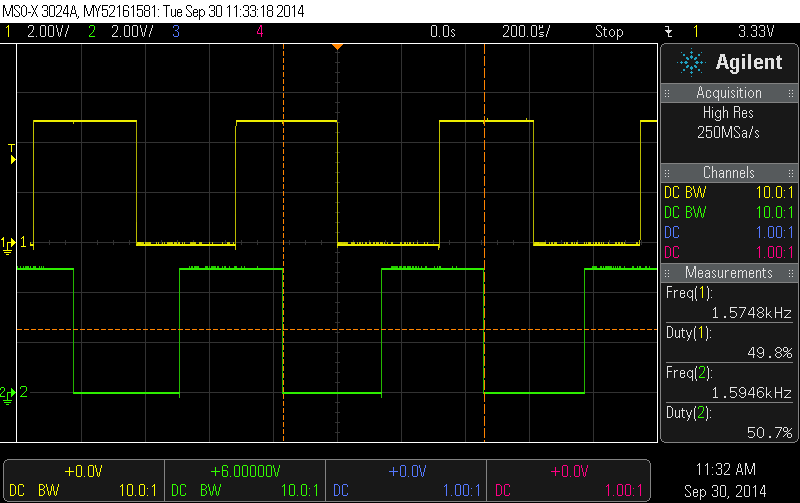 |
Encoder A and B outputs of a magnetic encoder on a high-power (HP) 6V Micro Metal Gearmotor running at 6 V. |
|---|
 |
Magnetic Encoder Kit for Micro Metal Gearmotors schematic diagram. |
|---|
Newer versions available: We now have versions of this encoder with top-entry connectors or side-entry connectors that work with our corresponding removable JST SH-type cables of various lengths.
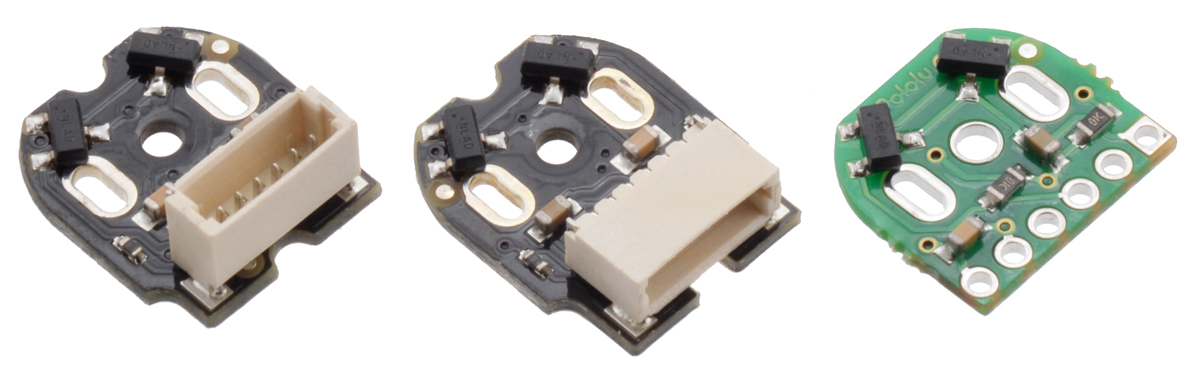 |
Side-by-side comparison of Magnetic Encoder with Top-Entry Connector (left), Side-Entry Connector (center), and 2mm-pitch through-holes (right). |
|---|
This kit includes two dual-channel Hall effect sensor boards and two 6-pole magnetic discs that can be used to add quadrature encoding to two micro metal gearmotors with extended back shafts (motors are not included with this kit). The encoder board senses the rotation of the magnetic disc and provides a resolution of 12 counts per revolution of the motor shaft when counting both edges of both channels. To compute the counts per revolution of the gearbox output shaft, multiply the gear ratio by 12.
|
This compact encoder solution fits within the 12 mm × 10 mm cross section of the motors on three of the four sides, and it only extends 0.6 mm past the edge of the fourth side (note: if you need it to be flush with that last side, you can carefully grind the board down a little and solder to the remaining half-holes). The assembly does not extend past the end of the extended motor shaft, which protrudes 5 mm beyond the plastic end cap on the back of the motor.
|
|
Note: This sensor system is intended for users comfortable with the physical encoder installation. It only works with micro metal gearmotors that have extended back shafts.
The encoder board is designed to be soldered directly to the back of the motor, with the back shaft of the motor protruding through the hole in the middle of the circuit board. One way to achieve good alignment between the board and the motor is to tack down the board to one motor pin and to solder the other pin only when the board is flat and well aligned. Be careful to avoid prolonged heating of the motor pins, which could deform the plastic end cap of the motor or the motor brushes. Once the board is soldered down to the two terminals, the motor leads are connected to the M1 and M2 pads along the edge of the board; the remaining four pads are used to power the sensors and access the two quadrature outputs:
|
|
The sensors are powered through the VCC and GND pins. VCC can be 2.7 V to 18 V, and the quadrature outputs A and B are digital signals that are either driven low (0 V) by the sensors or pulled to VCC through 10 kΩ pull-up resistors, depending on the applied magnetic field. The sensors’ comparators have built-in hysteresis, which prevents spurious signals in cases where the motor stops near a transition point.
|
Encoder A and B outputs of a magnetic encoder on a high-power (HP) 6V Micro Metal Gearmotor running at 6 V. |
|---|
The board’s six pads have a 2 mm pitch, so they do not work with common 0.1″ connectors. One option for connecting to the board is to solder in individual wires, such as in the example below:
|
Alternatively, you can solder a 2mm-pitch connector to the board. The examples below show a male header, which gives you the option of making a detachable cable terminated by a 6-pin 2mm-pitch female header. If the pins are angled over the motor, as shown in the picture below, they will just barely protrude through the holes in the board. Note that in this orientation, there is room to plug in a female header even when our extended micro metal gearmotor bracket is being used.
|
If the pins are pointed away from the motor, they will need to be angled so that they sufficiently clear the magnetic disc. With a decent soldering iron, it is possible to solder them in this orientation even after the encoder has been installed on the motor.
|
Once the board is soldered to the motor, the magnetic encoder disc can be pushed onto the motor shaft. One easy way to accomplish this is to press the motor onto the disc while it is sitting on a flat surface, pushing until the shaft makes contact with that surface. The size of the gap between the encoder disc and the sensor board does not have a big impact on performance as long as the motor shaft is at least all the way through the disc.
|
This schematic is also available as a downloadable pdf (125k pdf).
This encoder version is a minor alteration to the previous version that just enlarges the motor terminal holes so they can accommodate the larger terminals on the HPCB versions of our micro metal gearmotors. The two encoder versions are otherwise identical, and this new one can serve as a drop-in replacement for the previous one. The following two pictures show a side-by-side comparison of the old version (left) and the new one (right):
|
|
| Size: | 10.6 mm × 11.6 mm1 |
|---|---|
| Weight: | 1.0 g2 |
| Minimum operating voltage: | 2.7 V |
|---|---|
| Maximum operating voltage: | 18 V |
| Connector: | none (2mm-pitch through-holes) |
| PCB dev codes: | enc03b |
|---|---|
| Other PCB markings: | 0J8984 |
This file contains 3D models (in the step file format) of the components for the Magnetic Encoder Pair Kit for Micro Metal Gearmotors, 12 CPR, 2.7-18V (HPCB compatible)
This DXF drawing shows the locations of all of the board’s holes.
No FAQs available.

Everyone wants encoders on their motors, but not everyone wants to solder a bunch of wires to a tiny encoder board. That is why I am excited to...

Pololu customer Yvon Hache made this 3D-printed aerial photography rig that he shared in a forum post. The rig, trailing 100 feet below the kite,...

Pololu customer Alvaro Villoslada made this impressive open-source 3D-printable hand prothesis. Each finger uses a 1000:1 Micro Metal Gearmotor HP...

On Monday, Colin McGinn launched a Kickstarter in order to create a 3D short film using Tru.D 3D, which is a volumetric display system that he...

It has been a few months since we introduced our new high-power micro metal gearmotors with longer life carbon brushes. We now have them available...