This is a merged information page for Item #2459.
View normal product page.
Pololu item #:
2459
Brand:
Pololu
Status:
Active and Preferred

The QTR-1RC reflectance sensor carries a single infrared LED and phototransistor pair in an inexpensive, tiny 0.5" x 0.3" module that can be mounted almost anywhere and is great for edge detection and line following. The output is designed to be measured by a digital I/O line. This sensor is sold in packs of two units.
 Compare all products in Older QTR Sensors or Single-Channel QTR Reflectance Sensors.
Compare all products in Older QTR Sensors or Single-Channel QTR Reflectance Sensors.
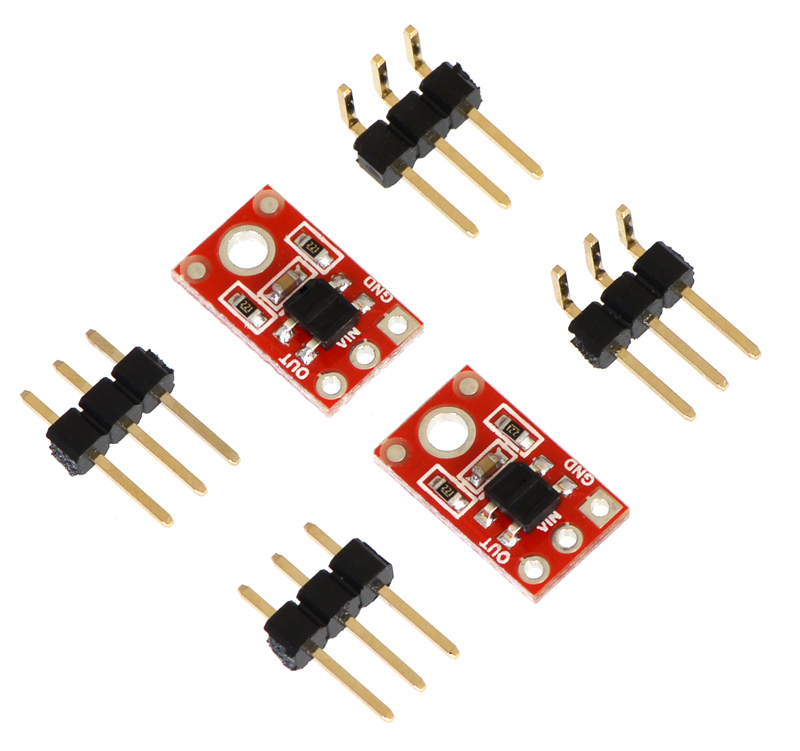 |
QTR-1RC reflectance sensors with included optional header pins. |
|---|
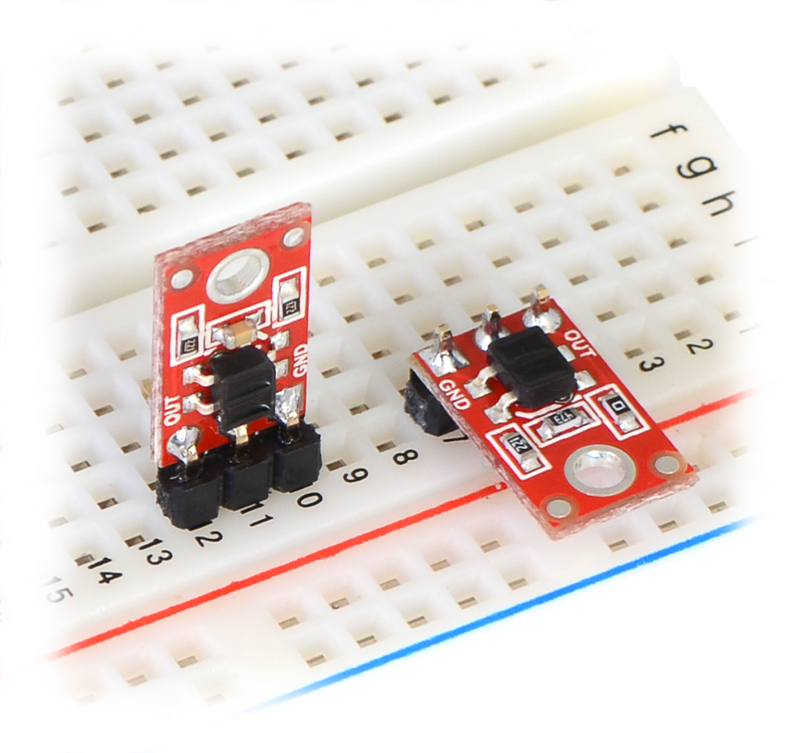 |
QTR-1A and QTR-1RC reflectance sensors plugged into a breadboard in two possible orientations. |
|---|
 |
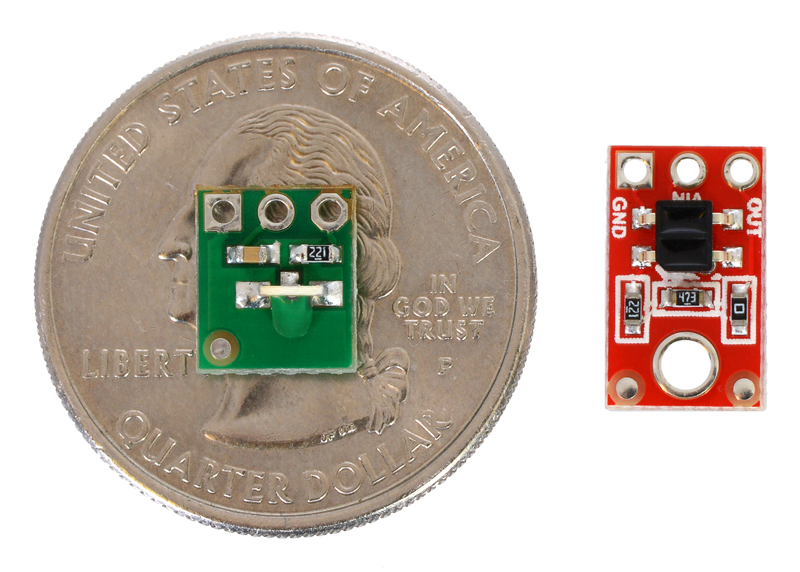
QTR-1A reflectance sensor on a quarter for size reference. |
|---|
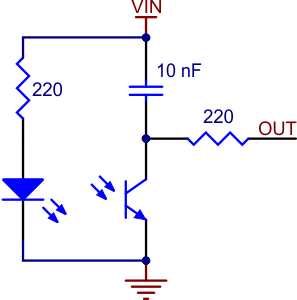 |
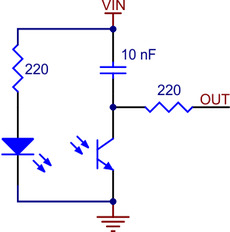
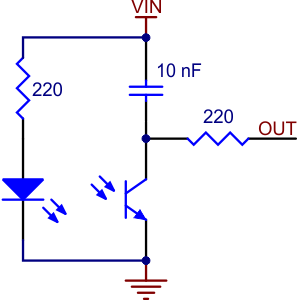
QTR-1RC and QTR-L-1RC reflectance sensor schematic diagram. |
|---|
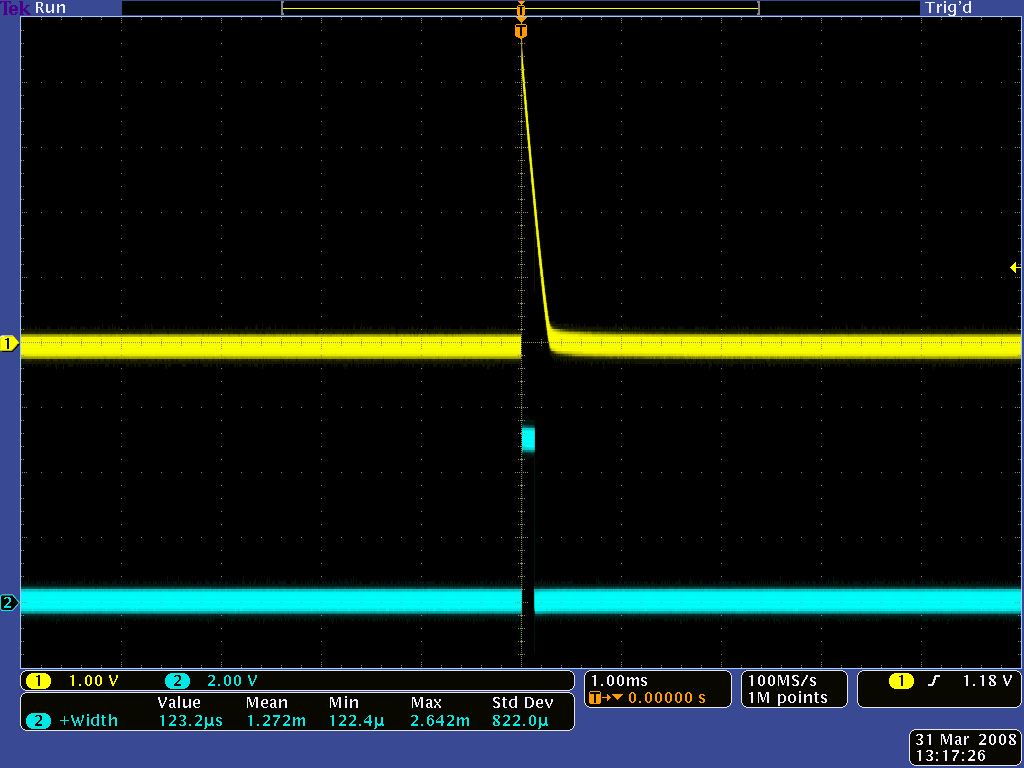 |
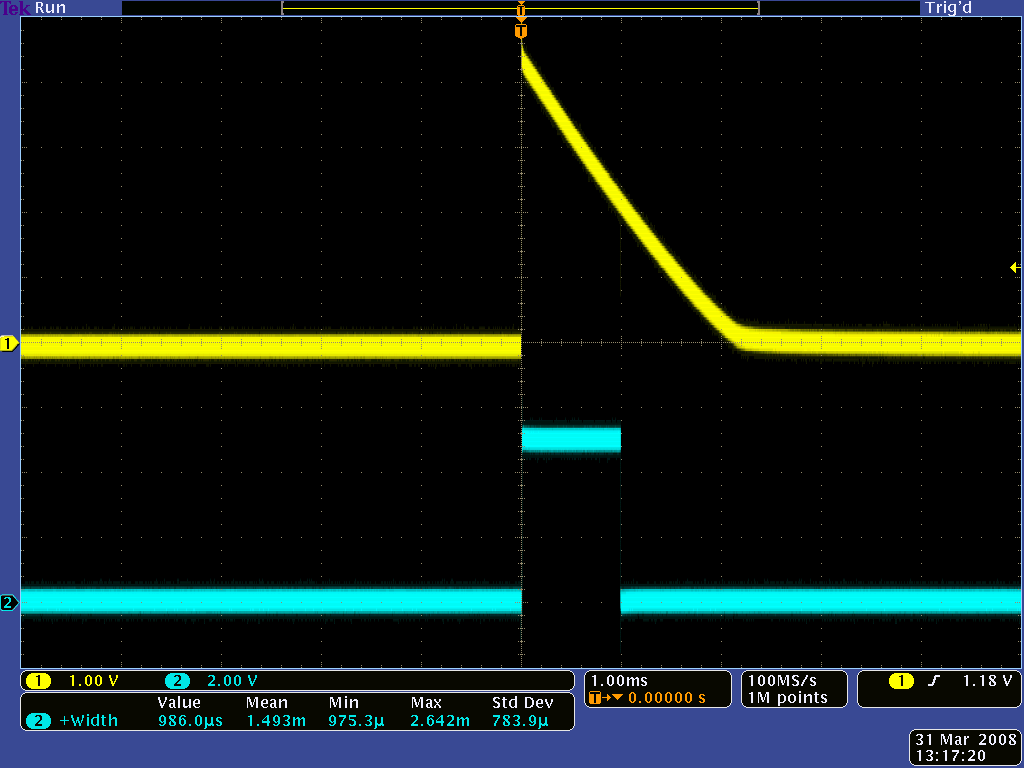
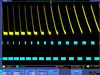
QTR-1RC output (yellow) when 1/8" above a white surface and microcontroller timing of that output (blue). |
|---|
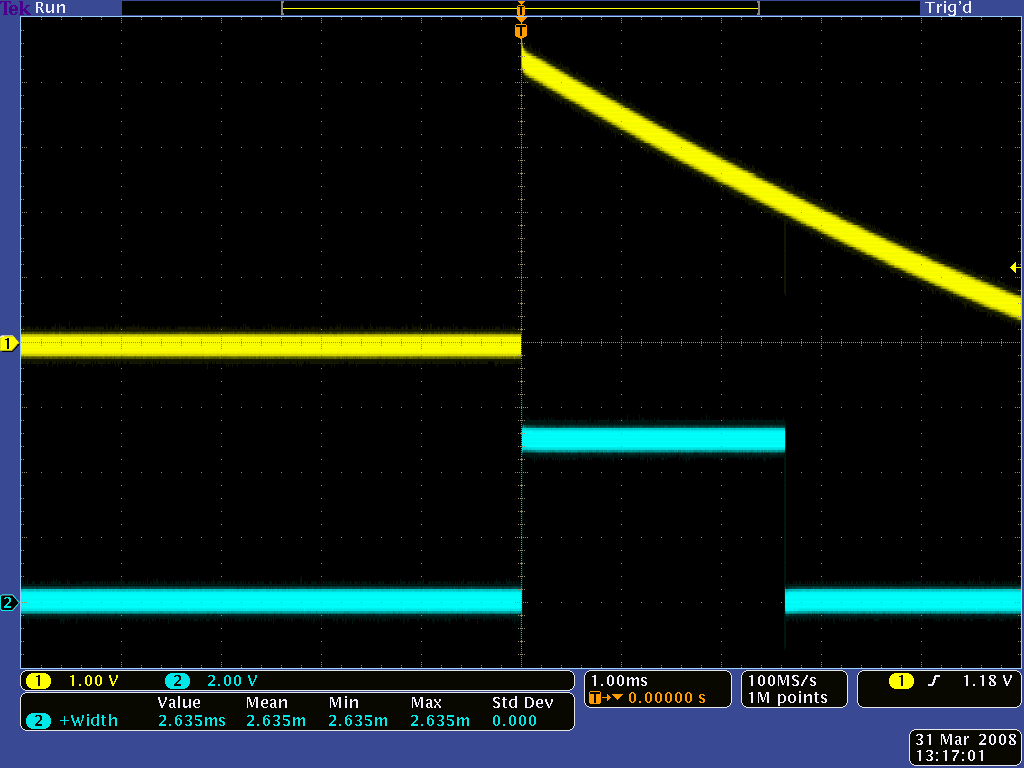 |
QTR-1RC output (yellow) when 1/8" above a black line and microcontroller timing of that output (blue). |
|---|
 |
QTR-L-1RC reflectance sensor on a quarter next to a QTR-1A reflectance sensor. |
|---|
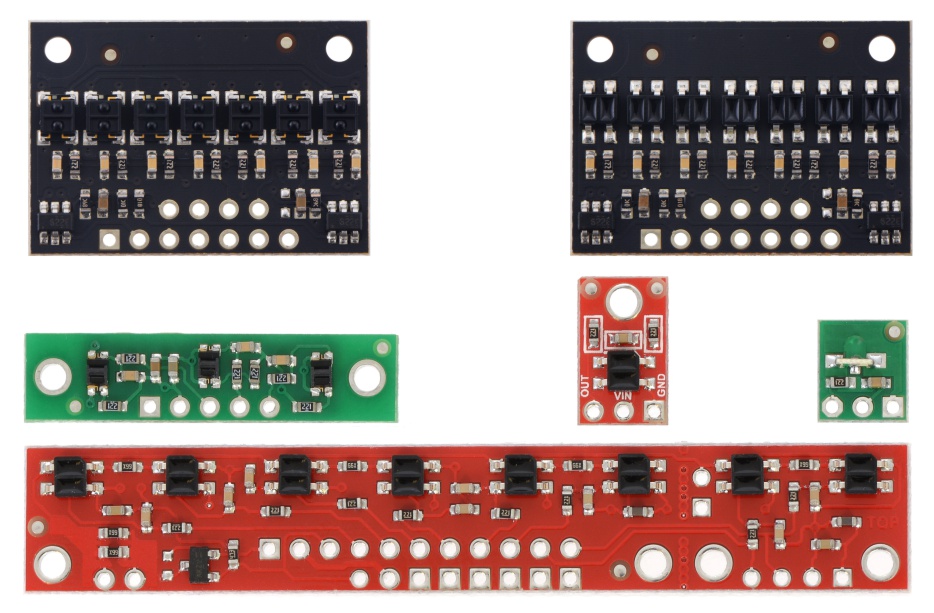 |
QTR sensor size comparison. Top row: QTRX-HD-07, QTR-HD-07; middle row: QTR-3, QTR-1, QTR-L-1; bottom row: QTR-8. |
|---|
Note: The QTR-1RC reflectance sensor requires a digital I/O line to take readings. The similar QTR-1A reflectance sensor is available with an analog output.
 |
The Pololu QTR-1RC reflectance sensor carries a single infrared (IR) LED and phototransistor pair. To use the sensor, you must first charge the output node by applying a voltage to the OUT pin. You can then read the reflectance by withdrawing that externally applied voltage on the OUT pin and timing how long it takes the output voltage to decay due to the integrated phototransistor. Shorter decay time is an indication of greater reflection. This measurement approach has several advantages, especially when multiple units are used:
The LED current-limiting resistor is set to deliver approximately 17 mA to the LED when VIN is 5 V. The current requirement can be met by some microcontroller I/O lines, allowing the sensor to be powered up and down through an I/O line to conserve power.
This sensor was designed to be used with the board parallel to the surface being sensed. Because of its small size, multiple units can easily be arranged to fit various applications such as line sensing and proximity/edge detection.
For a line sensor with eight of these units arranged in a row, please see the QTR-8RC reflectance sensor array; for a similar array of three slightly different sensor components, see the QTR-3RC. For a similar, smaller sensor with longer range, and intended for use with the board perpendicular to the surface, please see the QTR-L-1RC reflectance sensor.
|
QTR sensor size comparison. Top row: QTRX-HD-07, QTR-HD-07; middle row: QTR-3, QTR-1, QTR-L-1; bottom row: QTR-8. |
|---|
|
QTR-1RC output (yellow) when 1/8" above a black line and microcontroller timing of that output (blue). |
|---|
Like the Parallax QTI, this sensor requires a digital I/O line capable of driving the output line high and then measuring the time for the output voltage to decay. The typical sequence for reading a sensor is:
|
These steps can typically be executed in parallel on multiple I/O lines.
With a strong reflectance, the decay time can be as low as several dozen microseconds; with no reflectance, the decay time can be up to a few milliseconds. The exact time of the decay depends on your microcontroller’s I/O line characteristics. Meaningful results can be available within 1 ms in typical cases (i.e. when not trying to measure subtle differences in low-reflectance scenarios), allowing up to 1 kHz sampling.
Our Pololu AVR library provides functions that make it easy to use these sensors with our Orangutan robot controllers; please see the QTR Reflectance Sensors section of our library command reference for more information. We also have a Arduino library for these sensors.
This module has a single mounting hole intended for a #2 screw (not included); if this mounting hole is not needed, this portion of the PCB can be ground off to make the unit even smaller. Each pack of two reflectance sensors includes sets of straight male header strips and right-angle male header strips, which allow you to mount them in the orientation of your choice (note: the header pins might ship as 1×6 strips that you can break into two 1×3 pieces). You can also solder wires, such as ribbon cable, directly to the pads for the most compact installation.
|
|
With only four components (or five, if you count the coupled IR LED and phototransistor separately), the operation of this sensor is relatively basic. The emitter side is just an IR LED with an appropriate current-limiting resistor. The light from the emitter leaves the sensor, reflects off a nearby surface, and returns to the detector.
The detector side is a resistor-capacitor (RC) circuit, where the resistance comes from the phototransistor and is a measure of the incident infrared light, and the decay time is proportional to the resistance. The first step of the sensor-reading process—driving the sensor output high—discharges the integrated 10 nF capacitor and puts both sides at the same voltage (VIN). Alternatively, you can think of this as “charging the output node”, and it is functionally equivalent to charging a capacitor with one side connected to ground. Once you are no longer supplying an external voltage to the output pin, the capacitor can slowly charge through the phototransistor, with the rate of charging being a function of the phototransistor’s resistance (which is in turn a function of the incident IR). As the capacitor charges, the voltage on the output side drops, eventually reaching zero when the capacitor is fully charged. Alternatively, you can think of this as “discharging the output node”, and it is functionally equivalent to discharging a capacitor with one side connected to ground.
The 220 Ω resistor on the OUT line serves to limit the current flow, making it possible for a microcontroller output to safely charge the output node prior to each reading. It has very little effect on the sensor output.
|
|
| Size: | 0.3″ × 0.5″ × 0.1″1 |
|---|---|
| Weight: | 0.2 g2 |
| PCB dev codes: | irs01a |
|---|
Information about using the Pololu QTR reflectance sensors, including differences between A-type and RC-type sensors and sample oscilloscope screen captures of sensor outputs.

Information about installing and using the C/C++ libraries provided for use with Pololu products.
A reference to commands provided in the Pololu C/C++ and Arduino libraries for the AVR.

Step-by-step instructions for building your own line-following courses.
This is the sensor that we initially used in the Pololu QTR reflectance sensors, but we have since switched to a similar generic unit that has slightly longer range.
This DXF drawing shows the locations of all of the board’s holes.
Un guide utiliser et exploiter un senseur QTR (détecteur de ligne) (version 0.1). Note: This French translation of our QTR sensor documentation was made by our distributor MCHobby.
Matthew Phillipps ported our Arduino Library for the Pololu QTR Reflectance Sensors to the mbed platform. The Arduino library is designed to work with Pololu QTR reflectance sensors, so the mbed library should too, but Matthew points out he only tested it with the analog sensors. This library was not written and is not maintained by Pololu.
This library for Arduino makes it easy to interface with Pololu QTR Reflectance Sensors.
The two modules are similar, but there are a few noteworthy differences:

Forum user DrGFreeman has been posting about his custom Mini Sumo robot. He designed the chassis in CAD and 3D printed it; the model is available on...

Hi, my name is Patrick. I am an engineering intern at Pololu and am studying at the University of Nevada, Las Vegas to earn a mechanical engineering...

After branching off into maze solving, pushing into sumo, and finding our way through dead reckoning, we circled back and had another line...

Several Pololu employees made robots for the LVBots dead reckoning competition. Unfortunately, my robot didn’t work enough in time for the...
For the recent LVBots dead reckoning competition that was hosted here at Pololu, I decided to make a robot based on the Baby Orangutan robot...