This is a merged information page for Item #1123.
View normal product page.
Pololu item #:
1123
Brand:
PCX
Status:
Special Order Only

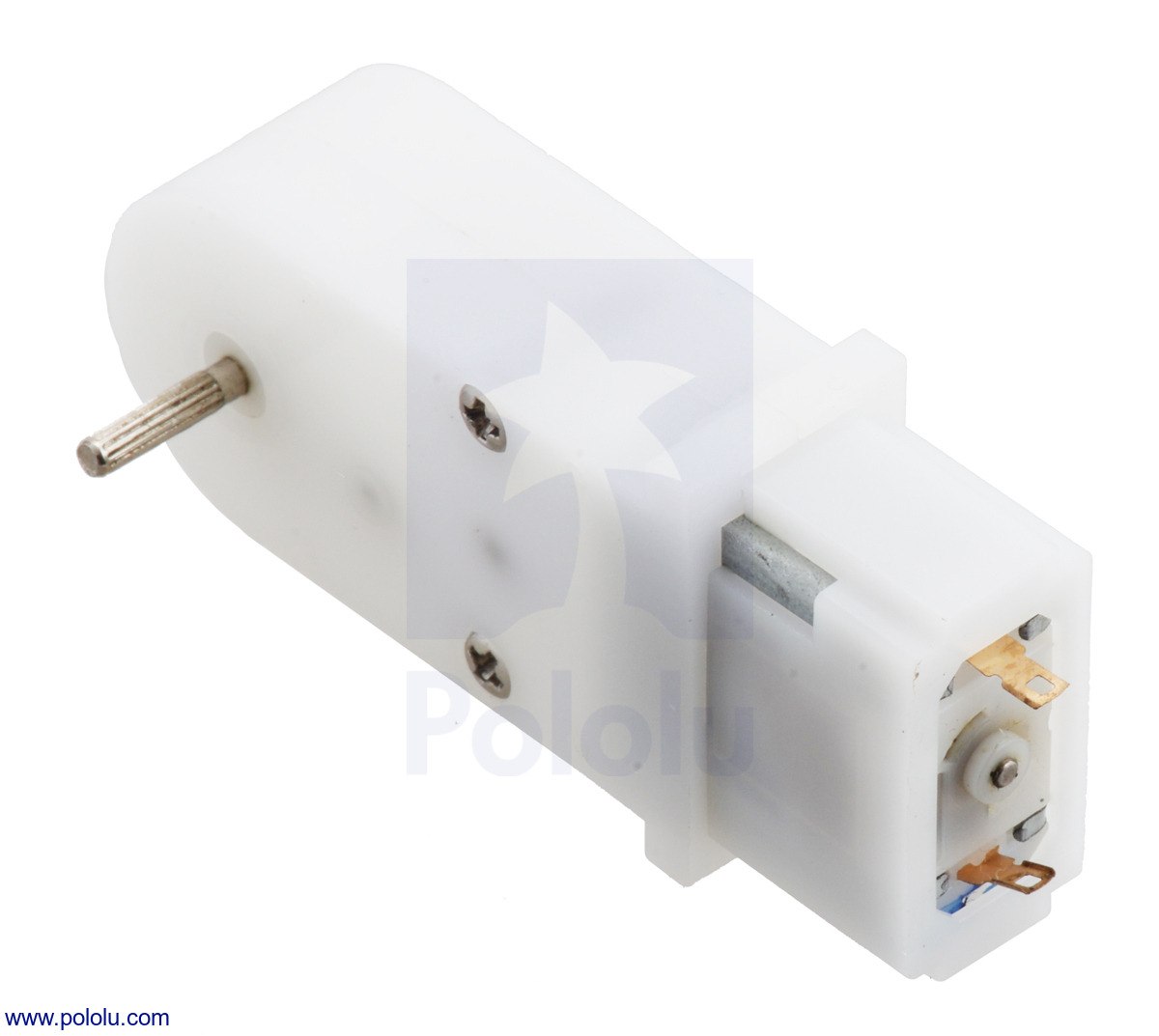
This compact, inexpensive, low-current gearmotor (brushed DC motor with a 120:1 reduction gearbox) is well suited for use in small robots. While intended for operation at 4.5 V, it should run comfortably in the 3 V to 6 V range. The splined output shaft has a crest diameter of 2 mm and is perpendicular to the motor shaft. The gearbox is protected by a built-in safety clutch that helps protect the gears from excessive loads.
Key specifications:
| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 4.5 V | 120 RPM, 80 mA | 1.4 kg⋅cm (20 oz⋅in), 800 mA |
Alternatives available with variations in these parameter(s): shaft type no-load speed @ 4.5V extended motor shaft? Select variant…
 Compare all products in Mini Plastic Gearmotors.
Compare all products in Mini Plastic Gearmotors.
|
120:1 mini plastic gearmotor with 90 degree 2mm spline output shaft. |
|---|
 |
120:1 mini plastic gearmotor with 90 degree 2mm spline output shaft. |
|---|
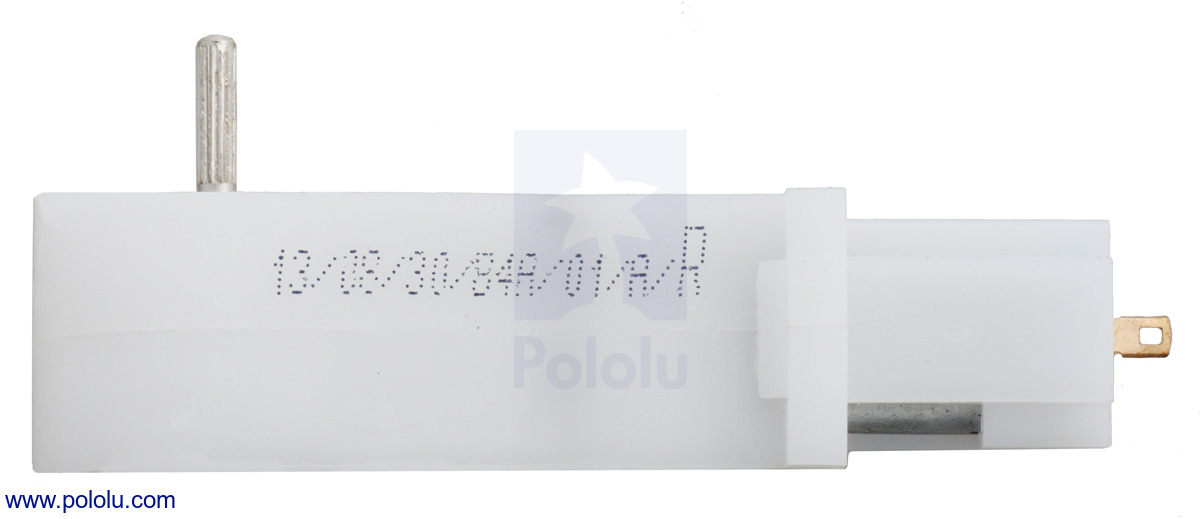 |
Side view of 120:1 mini plastic gearmotor with 90 degree 2mm spline output shaft. |
|---|
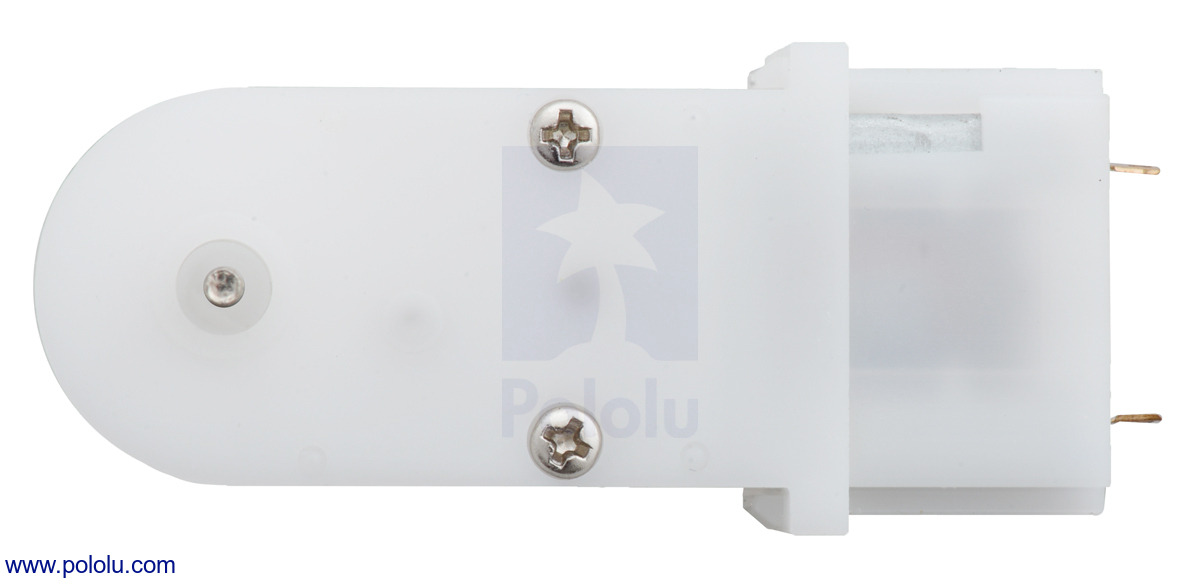 |
Rear view of 120:1 mini plastic gearmotor with 90 degree 2mm spline output shaft. |
|---|
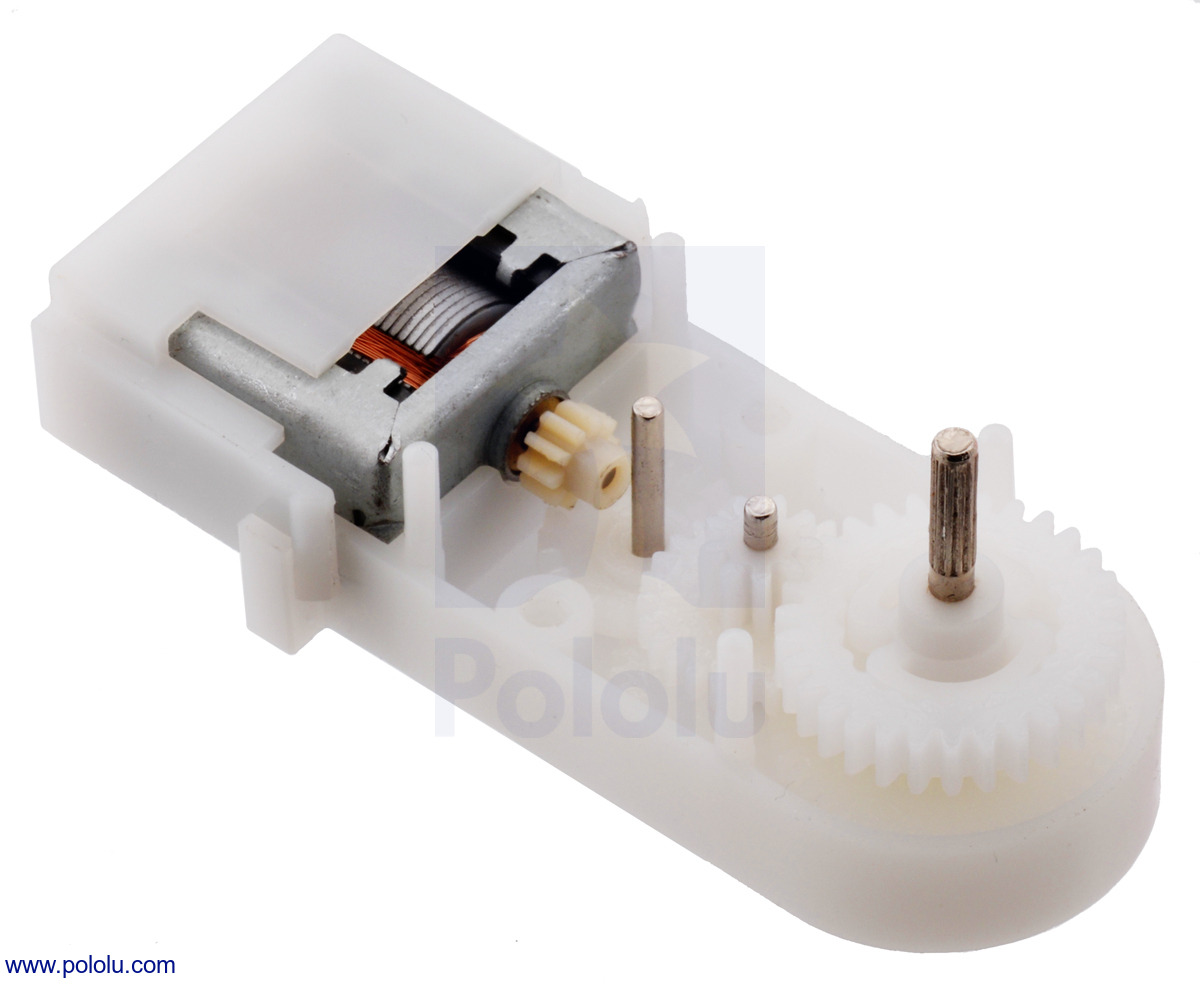 |
Gears inside the mini plastic gearmotor with 90 degree output (2mm spline version). |
|---|
|
Gears inside the mini plastic gearmotor with 90 degree output (2mm spline version). |
|---|
This brushed DC gearmotor is very compact and weighs only 0.7 ounces (19.5 grams) — perfect for building a quick, miniature robot. They are intended for use at 4.5 V, though in general, these kinds of motors can run at voltages above and below this nominal voltage, so they should operate comfortably in the 3 V to 6 V range (rotation can start at voltages as low as 0.6 V). Lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor. The plastic gearbox is protected by a built-in safety clutch that will typically slip before the gear teeth can shear (typically when the load exceeds around 25 oz-in, or 2 kg-cm).
Exact gear ratio: ``(22×38×44×26×30) / (10×11×11×22×9) ~~ bb(119.76)``
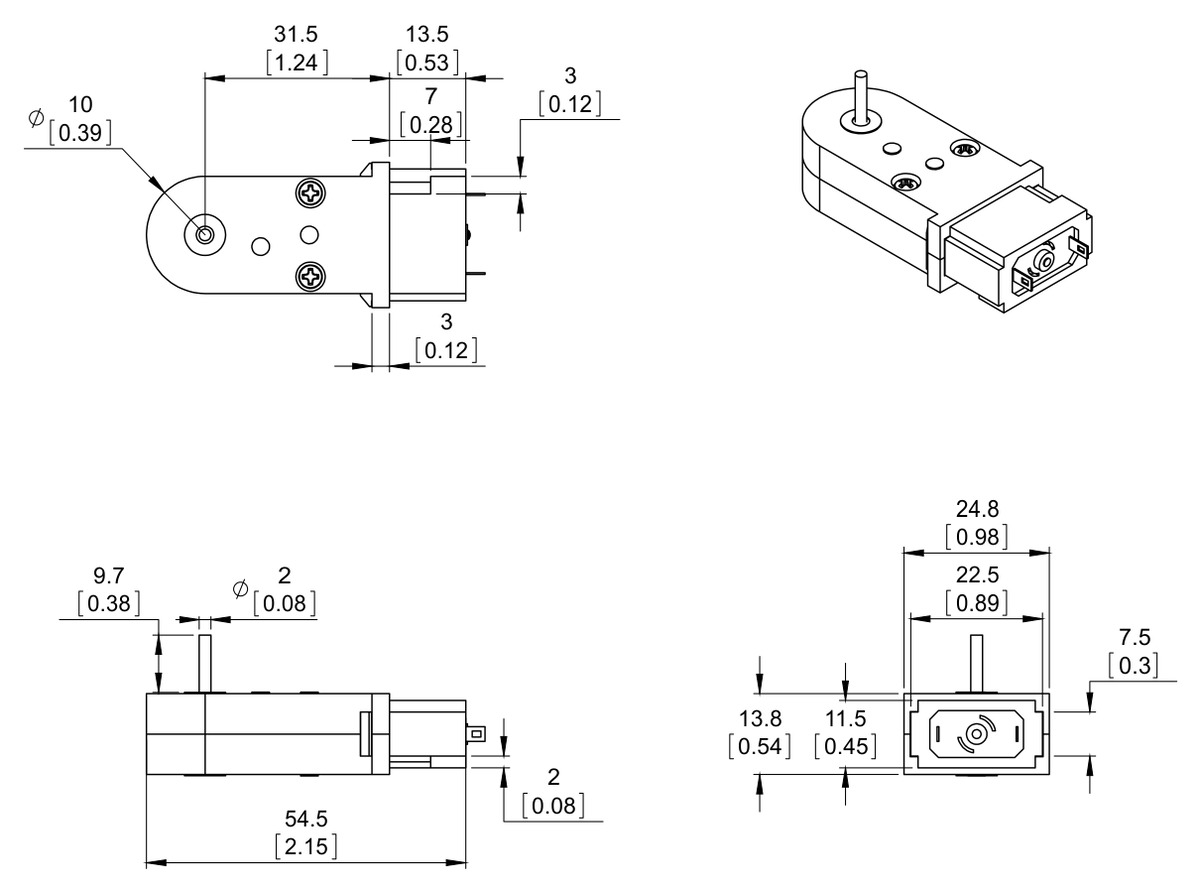 |
Dimension diagram of the mini plastic gearmotor with 90° 2mm spline output (units are mm over [in]). |
|---|
This dimension diagram is also available as a downloadable pdf (75k pdf).
This gearmotor features a splined, chrome-finish output shaft with a 2mm-crest diameter. This shaft can be used with custom wheels or with our adapter for LEGO wheels. The gearbox output shaft is perpendicular to the motor shaft.
We carry two versions of mini plastic gearmotors with 2 mm diameter spline output shafts, one with an offset shaft and one with a 90° shaft.
We have many more versions of these mini plastic gearmotors available with 3 mm diameter “D”-shaped output shafts (just like the ones on our micro metal gearmotors) that are compatible with many Pololu wheels and our 3 mm universal mounting hubs. These versions offer two output shaft orientations relative to the motor shaft (offset and 90°), two motor options (normal and high-power, or HP for short), and two gearbox options (120:1 and 180:1). Additionally, some of these versions are available with an extended motor shaft that protrudes from the rear of the motor by approximately 4.5 mm. This second shaft has a diameter of 1.5 mm and rotates at the same speed as the input to the gearbox, offering a way to add a custom-built encoder to provide motor speed or position feedback. The following table shows all of the mini plastic gearmotors that have 3 mm D-shafts:
| Motor Type | Stall Current @ 4.5 V |
No-Load Speed @ 4.5 V |
Stall Torque @ 4.5 V |
 90° output |
 90° output + motor shaft |
 offset output |
 offset output + motor shaft |
|---|---|---|---|---|---|---|---|
| high-power (HP) |
1250 mA | 150 RPM | 25 oz-in | 120:1 mini HP | 120:1 mini HP | 120:1 mini HP | 120:1 mini HP |
| low-power | 800 mA | 120 RPM | 20 oz-in | 120:1 mini | 120:1 mini | 120:1 mini | 120:1 mini |
| 80 RPM | 30 oz-in | 180:1 mini | 180:1 mini |
Note: The stall torque values listed are approximate, and the built-in safety clutch might start slipping at lower torques.
|
|
|
|
|
|
|
| Size: | 54.5 x 20 x 13.8 mm1 |
|---|---|
| Weight: | 19 g |
| Shaft diameter: | 2 mm2 |
| Shaft type: | 90° 2mm spline |
|---|---|
| Typical operating voltage: | 4.5 V |
| Gear ratio: | 120:1 |
| No-load speed @ 4.5V: | 120 rpm |
| No-load current @ 4.5V: | 80 mA |
| Stall current @ 4.5V: | 800 mA |
| Stall torque @ 4.5V: | 20 oz·in3 |
| Extended motor shaft?: | N |
Dimension diagram of the mini plastic gearmotor with 90° 2mm spline output.
This MATLAB script, written by Ali Asgher Mansoor Habiby, plots speed, power, current draw, and efficiency as they vary with torque when you input the gearmotor specifications. It also prints the resistance of the motor, and the current draw and torque at which maximum efficiency and maximum power occur.
No; the information we have available for this motor can be found on its product page. However, you can approximate various additional motor parameters from the information found in the “Specs” tab.
The electrical resistance of the motor can be approximated by dividing the rated voltage by the stall current (at the rated voltage). The electromotive force constant (Ke) can be approximated by dividing the rated voltage by the free-run speed (at the rated voltage). To approximate the motor torque constant (Kt), you can divide the stall torque by the stall current.
For pretty much any DC motor, the current, speed, power, and efficiency curves as a function of torque will look like those in the graph below (assuming motor voltage and temperature are constant):
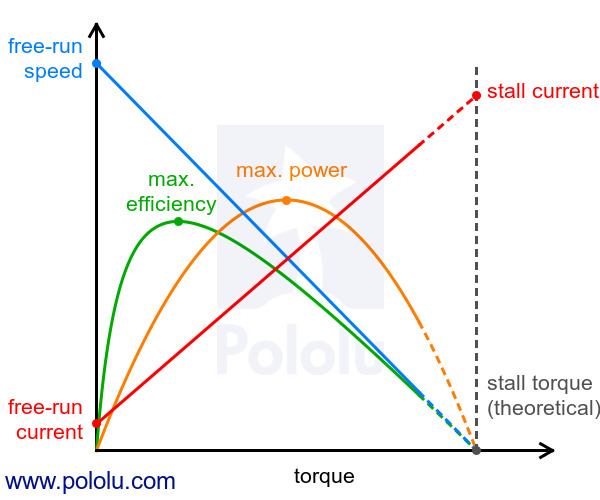 |
The current and speed curves are approximately linear, and the product pages for our motors provide the approximate end points for these lines: (0 torque, no-load current) and (stall torque, stall current) for the red line, and (0 torque, no-load speed) and (stall torque, 0 speed) for the blue line.
The orange output power curve is the product of the speed and the torque, which results in an inverted parabola with its peak at 50% of the stall torque.
The green efficiency curve is the output power divided by the input power, where the input power is current times voltage. The voltage is constant, so you can divide the output power curve by the current line to get the general shape of the efficiency curve, which in turn lets you identify the torque, speed, and current that correspond to max efficiency.
There are many programs out there that you can use to generate these curves. For example, if you have access to MATLAB, you can use this customer-created MATLAB script to generate these motor plots for you from the specifications we provide for each gearmotor.
Note: A good general rule of thumb is to keep the continuous load on a DC motor from exceeding approximately 20% to 30% of the stall torque. Stalling gearmotors can greatly decrease their lifetimes, occasionally resulting in immediate damage to the gearbox or thermal damage to the motor windings or brushes. Do not expect to be able to safely operate a brushed DC gearmotor all the way to stall. The safe operating range will depend on the specifics of the gearmotor itself.
No blog posts to show.