

This is a merged information page for Item #1110.
View normal product page.
Pololu item #:
1110
Brand:
Pololu
Status:
Special Order Only

This small, inexpensive motor controller allows variable speed and direction control of two small, brushed DC motors using a simple serial interface, making it easy to add motors to your microcontroller- or computer-based project. The motor supply voltage range is 4.5 to 13.5 V; the continuous current per channel is up to 1 A (3 A peak). The logic supply can be as low as 2.7 V, allowing operation with modern microcontrollers running at 3.3 V.
|
Pololu qik 2s9v1 dual serial motor controller. |
|---|
 |
Bottom view of the qik 2s9v1 dual serial motor controller with dimensions labeled. |
|---|
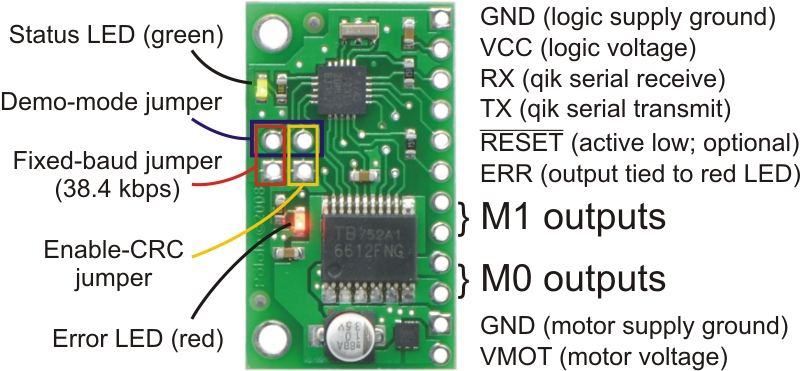 |
Top view of the qik 2s9v1 dual serial motor controller. |
|---|
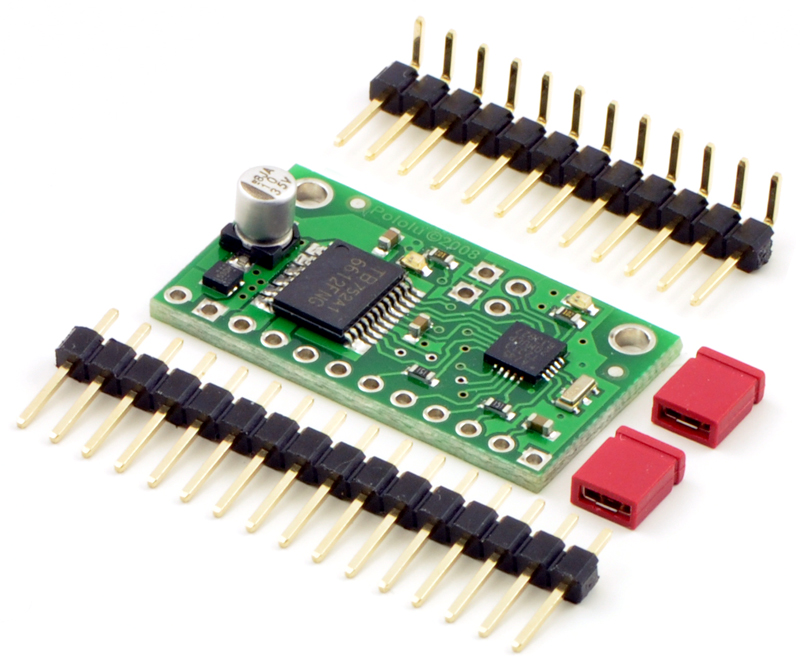 |
Qik 2s9v1 dual serial motor controller with included hardware. |
|---|
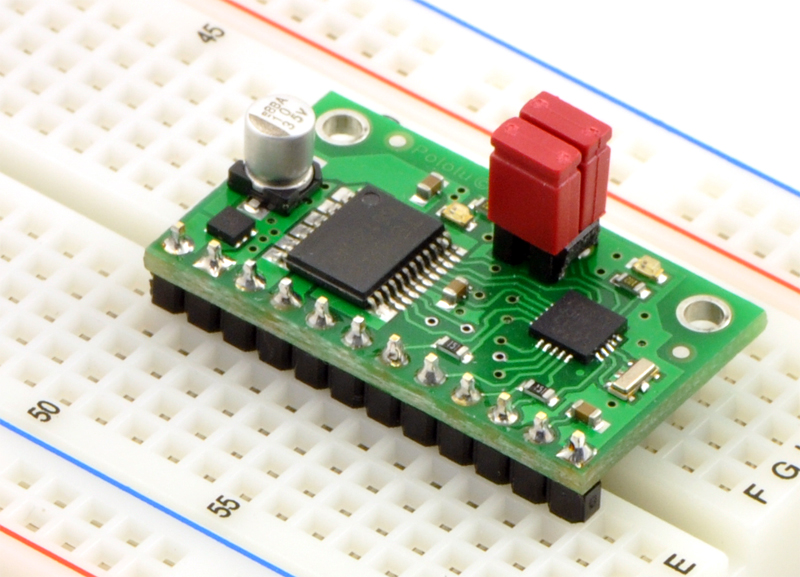 |
Qik 2s9v1 dual serial motor controller on a breadboard. |
|---|
|
The qik 2s9v1 is Pololu’s second-generation dual serial motor controller. The compact module allows any microcontroller or computer with a serial port (external RS-232 level converter required) or USB-to-serial adapter to easily drive two small, brushed DC motors with full direction and speed control. It provides ultrasonic, 8-bit PWM speed control via an advanced, two-way serial protocol that features automatic baud rate detection up to 38.4 kbps and optional CRC error checking. Two status LEDs give visual feedback about the serial connection and any encountered error conditions, making debugging easy, and a demo mode allows easy verification of proper operation.
The improvements over the previous generation and competing products include:
For a more advanced, higher-power version of this controller, please consider the qik 2s12v10. For a simpler carrier of the qik’s motor driver, please consider the TB6612FNG dual motor driver carrier, and for a robot controller based on the qik’s driver, please consider the Baby Orangutan and Orangutan SV-328 robot controllers and 3pi robot, which connect the TB6612 to a user-programmable AVR microcontroller.
November 27, 2013 update: We have changed this product by replacing the large, silver electrolytic capacitor with a much smaller ceramic capacitor. This lowers the profile of the board but does not affect functionality at all. The main product picture shows this new version; the rest of the pictures on this product page still show the previous version with the tall electrolytic capacitor.
|
| Motor channels: | 2 |
|---|---|
| Motor supply voltage: | 4.5 – 13.5 V |
| Continuous output current per channel: | 1 A |
| Peak output current per channel: | 3 A |
| Auto-detect baud rate range: | 1200 – 38400 bps |
| Fixed baud rate: | 38400 bps |
| Available PWM frequencies: | 31.5 kHz, 15.7 kHz, 7.8 kHz, 3.9 kHz |
| Logic supply voltage: | 2.7 – 5.5 V |
| Logic supply current: | < 15 mA |
| Reverse voltage protection?: | Y (on motor supply only) |
| Motor driver: | TB6612FNG |
|
|
The qik ships with a 16×1 straight 0.100" male header strip, a 12×1 right angle 0.100" male header strip, and two red shorting blocks. This hardware offers several options when it comes to making connections to the qik.
For the most compact installation, wires can be directly soldered to the qik pins themselves. For less permanent connections, the 16×1 straight header strip can be broken into a 12×1 piece and two 2×1 pieces. The 2×1 pieces can optionally be soldered into the jumper pins, and the 12×1 header strip of your choice can be soldered into the qik control pins. This allows connections to the qik via custom-made cables that have female headers on them, or the qik can simply be plugged into a breadboard. Using the right angle header allows for a compact profile or for vertical mounting into a breadboard; using the straight header allows for breadboarding as shown in the picture above.
We have written a basic Arduino library for the qik dual serial motor controllers that makes it simple to interface these controllers with an Arduino. The library handles the details of serial communication with the qik, allowing two brushed DC motors to be controlled easily.
| Size: | 0.70" x 1.20" |
|---|---|
| Weight: | 2 g1 |
| Motor driver: | TB6612FNG |
|---|---|
| Motor channels: | 2 |
| Control interface: | non-inverted TTL serial2 |
| Minimum operating voltage: | 4.5 V |
| Maximum operating voltage: | 13.5 V |
| Continuous output current per channel: | 1 A |
| Peak output current per channel: | 3 A |
| Maximum PWM frequency: | 32 kHz3 |
| Minimum logic voltage: | 2.7 V |
| Maximum logic voltage: | 5.5 V |
| Reverse voltage protection?: | Y4 |

User’s guide for the Pololu Qik 2s9v1 Dual Serial Motor Controller.

A simple serial transmitter utility for Windows that lets you transmit sequences of bytes at a selectable baud rate to a selectable COM port. This program can be conveniently used to send commands to our serially controllable devices.
This DXF drawing shows the locations of all of the board’s holes.
This is a library for the Arduino that interfaces with the Pololu qik 2s9v1 and qik 2s12v10 dual serial motor controllers. It makes it easy to control two brushed DC motors with a simple serial interface.
This is a library for controlling qik dual serial motor controllers written by Andy Grove in the Rust language.
No FAQs available.

For the recent LVBots line following competition, my first instinct was to try to come up with some unique alternative design for a robot that would...

The people at Seewald Solutions posted about their Raspberry Pi-based robot they call ToyCollect. Inspired by the creator’s daughter, who hides her...