

This is a merged information page for Item #1084.
View normal product page.
Pololu item #:
1084
Brand:
Pololu
Status:
Active and Preferred

These aluminum gearmotor brackets let you mount Pololu’s 37D mm metal gearmotors to your project. The brackets are sold in pairs, and each bracket includes six M3 screws for securing the motor to the bracket. Each bracket also features fourteen mounting holes for M3 or #4-size screws (not included), giving you a variety of mounting options.
 Compare all products in Motor Brackets.
Compare all products in Motor Brackets.
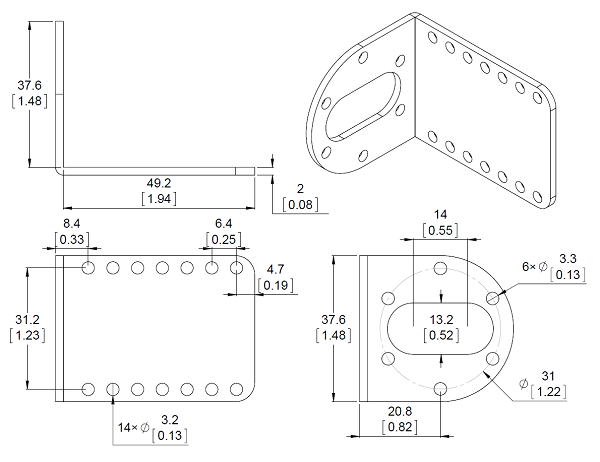 |
Mechanical drawing for the Pololu stamped aluminum L-bracket for 37D mm metal gearmotors. Units are mm over [inches]. |
|---|
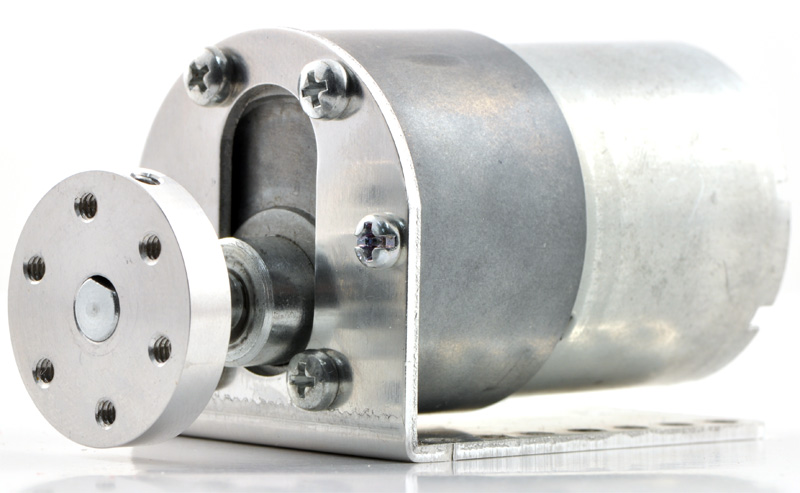 |
37D mm gearmotor (without encoder) with L-bracket and 6mm universal mounting hub. |
|---|
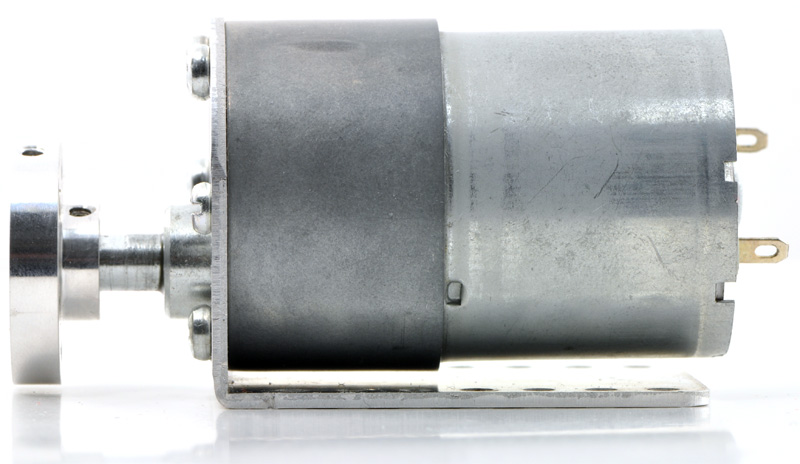 |
37D mm gearmotor (without encoder) with L-bracket and 6mm universal mounting hub. |
|---|
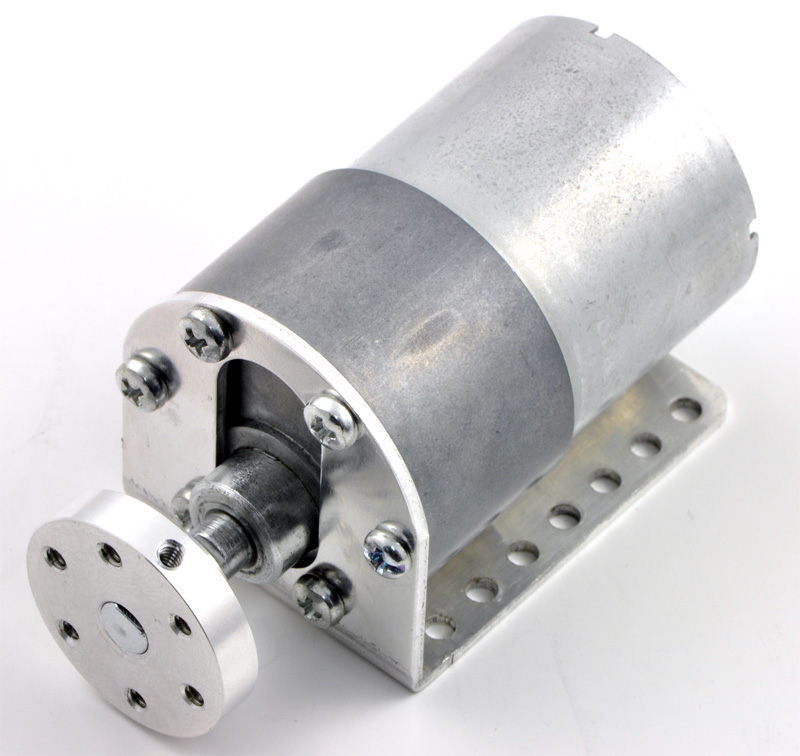 |
37D mm gearmotor (without encoder) with L-bracket and 6mm universal mounting hub. |
|---|
|
37D mm gearmotor (without encoder) with L-bracket and 6mm universal mounting hub. |
|---|
These light-weight brackets are specifically designed for Pololu’s 37D mm metal gearmotors. Each bracket features fourteen mounting holes (seven along each edge) for M3 or #4-size screws, giving you a variety of mounting options. A total of twelve 5 mm M3 screws (six for each bracket) are included for securing the motors to the brackets.
We also carry a machined bracket for our 37D mm gearmotors that provides an alternate, sturdier mounting option (this stamped L-bracket can bend under heavy load).
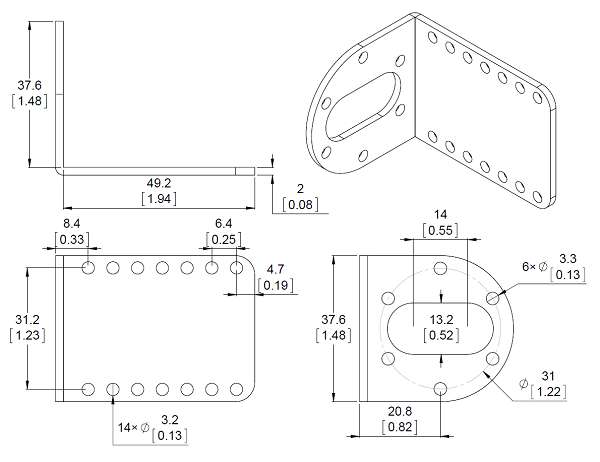 |
Mechanical drawing for the Pololu stamped aluminum L-bracket for 37D mm metal gearmotors. Units are mm over [inches]. |
|---|
This drawing is also available as a downloadable PDF (81k pdf).
Note: As of June 11, 2014, the thickness of these brackets has increased from 1.5 mm to 2 mm.
These dimensions apply to all brackets sold on or after June 11, 2014. The only change is the thickness of the bracket, which went from 1.5 mm to 2 mm.
These dimensions apply to all brackets sold before June 11, 2014; brackets sold after this date are 0.5 mm thicker.
No FAQs available.

One of our customers, Jochen Alt, built a robot that balances on top of a ball by driving around on it with omni-wheels. Even better, he very...

One of our customers posted about his balancing robot on our forum. A Raspberry Pi Model B is the central controller for the robot. It...

Zippy is an RC balancing robot created by Larry McGovern. It uses an Arduino Nano to read pulses from an RC receiver and accelerometer and...

This balancing robot by Kristian Lauszus uses two 37D metal gearmotors with encoders that are mounted with gearmotor brackets and driven with a...