Dagu Rover 5 Tracked Chassis with Encoders

This tracked chassis from Dagu Electronics makes a great base for building a small tank-like RC vehicle or autonomous robot. The chassis includes a battery holder and two DC motors, with an independent drive train and a quadrature encoder for each tread, so all you need to add to make a complete robot is a robot controller and the sensors of your choosing. A unique mechanism allows you to configure the clearance of the chassis by adjusting the angle of the gearbox assemblies.
Alternatives available with variations in these parameter(s): encoders? Select variant…
| Description | Specs (1) | Pictures (9) | Resources (2) | FAQs (0) | On the blog (1) | Distributors (0) |
|---|
Overview
 |
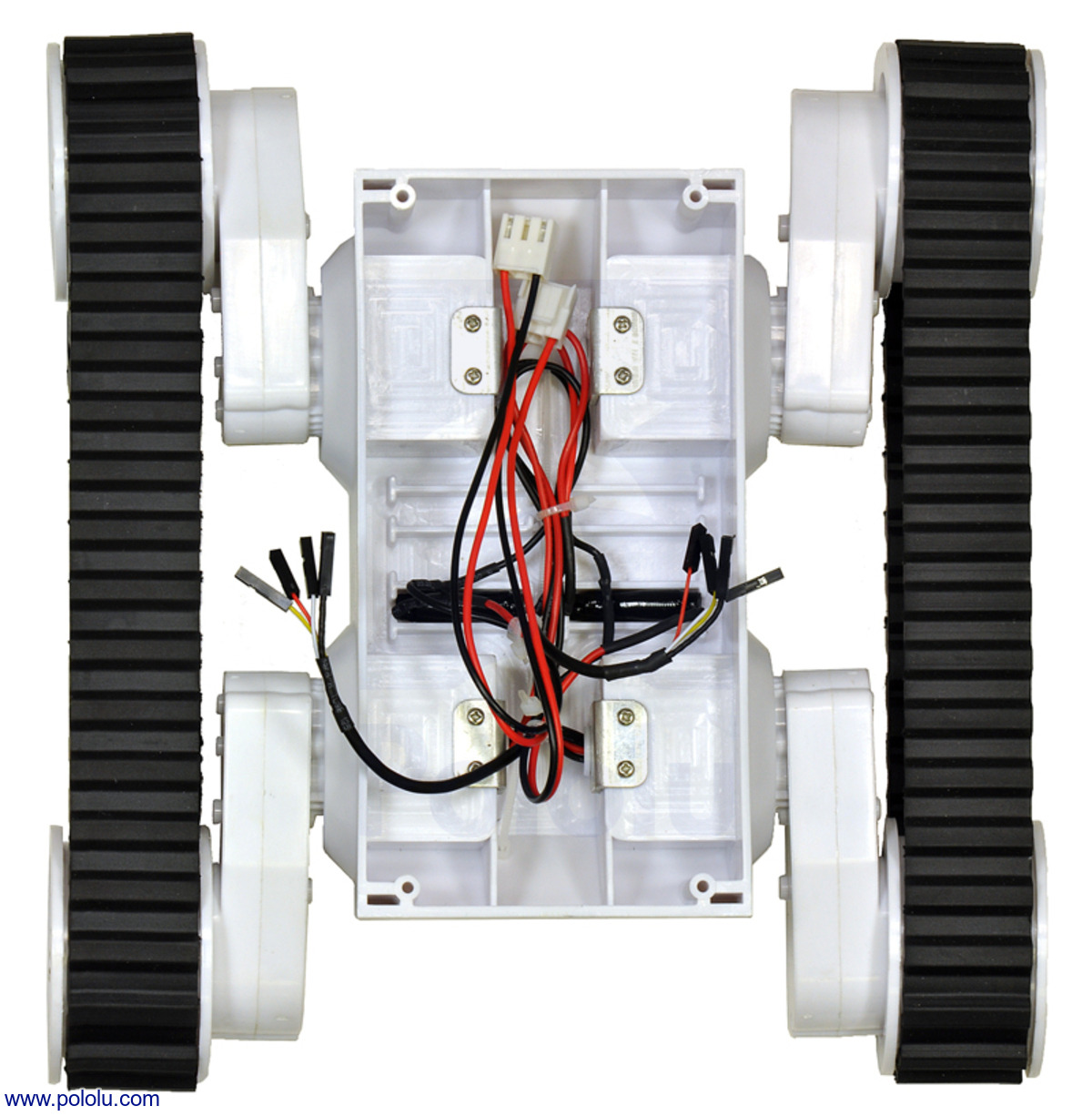
Dagu Rover 5 tracked chassis (without encoders), top view. |
|---|
 |
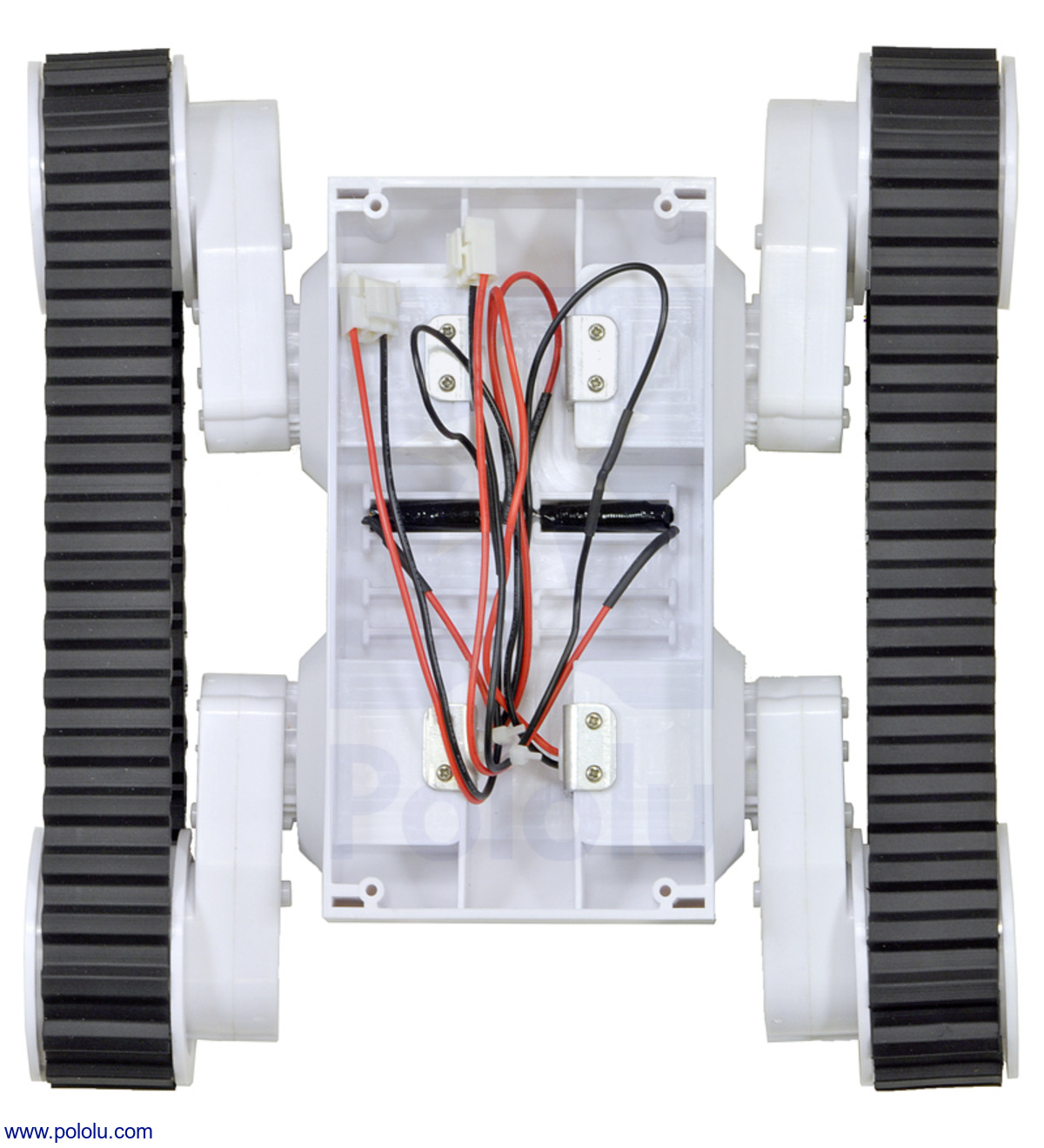
Dagu Rover 5 tracked chassis with encoders, top view. |
|---|
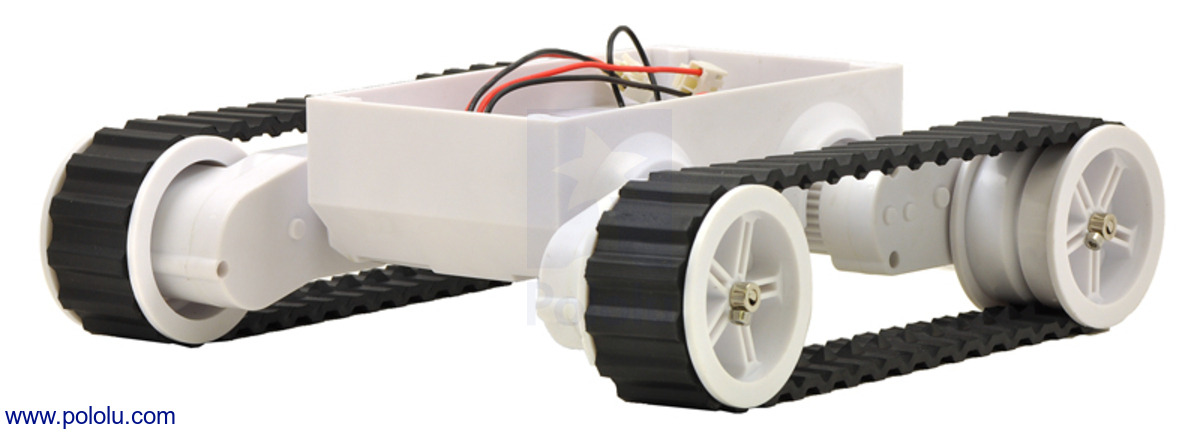
The Rover 5 tracked chassis, made by Dagu Electronics, is a durable robot platform with caterpillar treads that let it drive over many types of surfaces and uneven terrain. All you need to get the chassis moving is a robot controller or motor controller to drive the two built-in DC motors, which powered by the included 6-AA battery holder (AA batteries sold separately). A small Phillips screwdriver and an Allen wrench are included for working with the chassis.
The chassis features a rugged white plastic body with room to house the included battery holder and some additional electronics. The two powerful motors with 86.8:1 gearboxes are strong enough to lift the weight of the chassis and allow it to achieve speeds as high as 10 in/s (25 cm/s). We offer two versions of the Rover 5: with and without quadrature encoders; the encoders provide a resolution of 1000 counts per three revolutions of the wheel, or 333.33 CPR (counting both rising and falling edges of both encoder channels).
A unique feature of this chassis is the ability to adjust its height—and, therefore, the clearance under its body—by changing the angles at which the gearbox assemblies are mounted on the body. Interlocking teeth on the body and the gearboxes hold them in place and allow you to make adjustments in 5° increments by unscrewing a metal bracket inside the chassis, removing a gearbox, and reinserting it at a different angle. The elastic rubber tracks maintain sufficient tension with several different gearbox angles, allowing the chassis height to vary by nearly 1.5" (3.8 cm).
|
|

The outer dimensions of the chassis are approximately 9.5" long, 9" wide, and 3" tall in its default, flattened configuration (with the front and rear gearboxes mounted at an angle of 180° to each other).
Feature summary
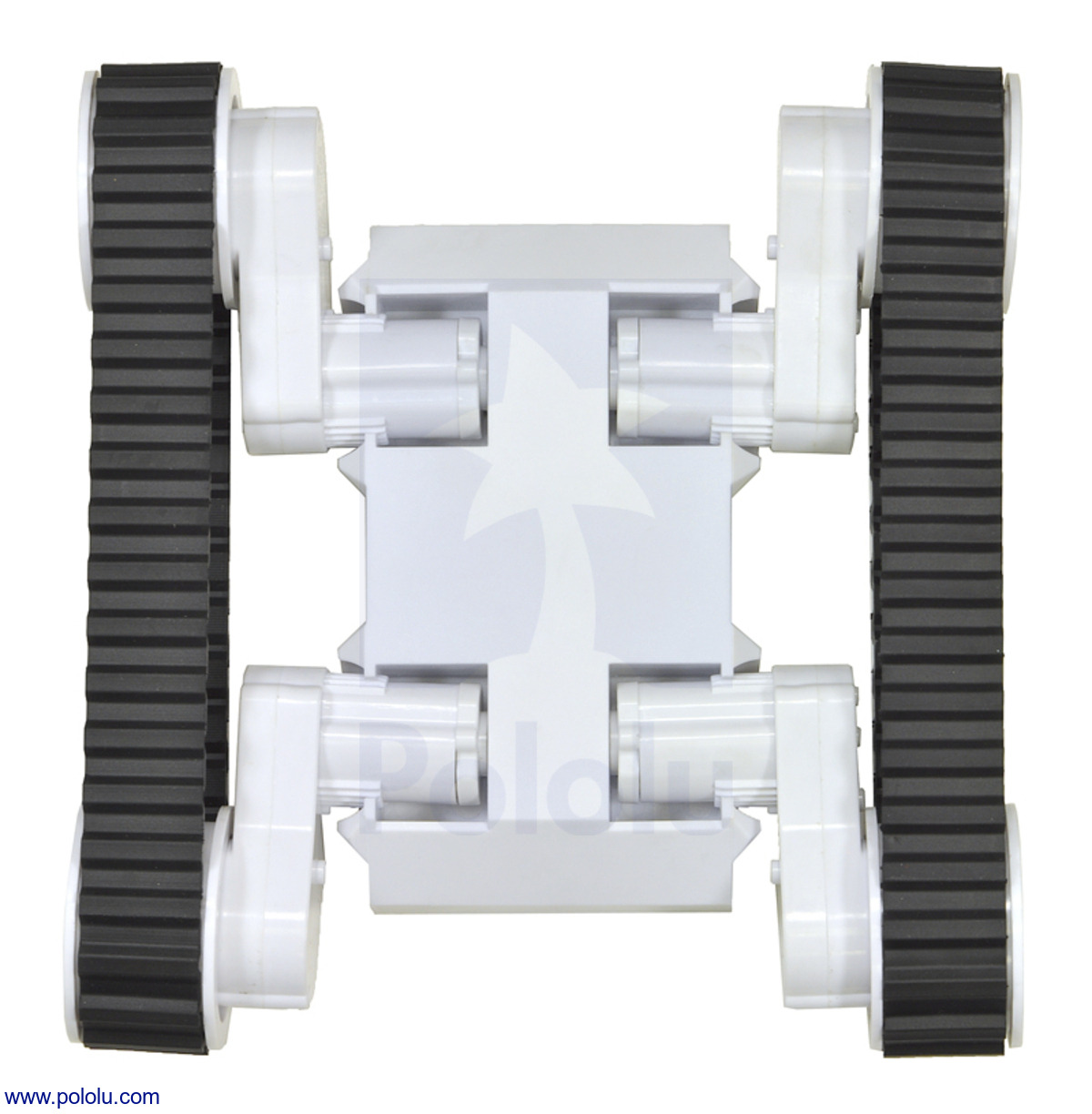 |
Dagu Rover 5 tracked chassis, bottom view, showing adjustable gearbox assemblies. |
|---|
- durable plastic body
- 6-AA battery holder included
- two brushed DC motors with 210 mA free run and 2.4 A stall current at 7.2 V
- maximum speed of 10 in/s (25 cm/s) at 7.2 V
- ability to scale inclines limited only by friction
- height and clearance can be varied by adjusting gearbox angles
- version with encoders features two 333 CPR quadrature encoders (one for each track)
- dimensions: 9.5" × 9" × 3" (24.5 × 22.5 × 7.5 cm) in default configuration
- weight: 1.6 lb (0.72 kg)
Expanding the chassis
This chassis is compatible with our 1/8" acrylic RP5 expansion plates, which are available in narrow and wide versions and make it easy to add your control electronics, sensors, wireless modules, servos, etc. The plates feature flexible mounting hole patterns and include four tapping screws to mount the plate to the chassis (although we have noticed a misalignment between the mounting holes on the expansion plates and the Rover 5, so you might only be able to secure two of the screws on opposing corners). The plates come in 8 colors:
Alternatives available with variations in these parameter(s): color size Select variant…
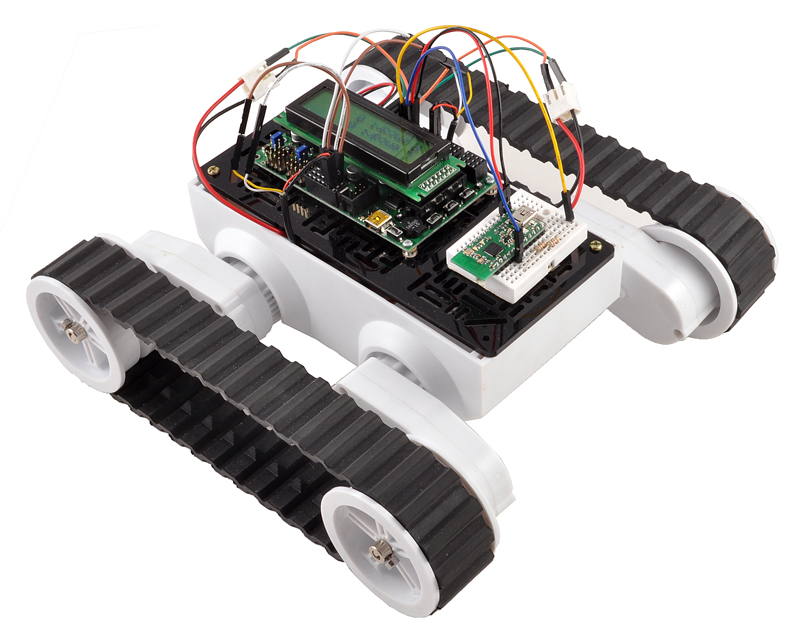 |
Dagu Rover 5 chassis with Orangutan SVP robot controller and additional electronics mounted to an RP5/Rover 5 expansion plate (narrow). |
|---|
Using the Chassis
With only four motor leads and two battery leads, it is easy to interface the chassis with most dual motor controllers and robot controllers. Simply connect the battery holder leads to the controller’s power source and the motor leads to the controller’s motor driver outputs. Each set of motor leads is terminated with a female 3.96 mm pitch, 3-pin JST VH-style connector (the middle pin is not used), which our male premium jumper wires plug into nicely.
The TReX Jr dual motor controller makes it easy to turn this chassis into a platform that can be controlled by RC signals or serial commands, or you can accomplish the same thing by pairing two of our newer Simple Motor Controllers. The Orangutan SV-328 or Baby Orangutan robot controllers work well with this chassis and make it easy to get an autonomous robot up and running (note: the stall current exceeds the ratings for these robot controllers, so make sure to avoid stalling the motors).
The Rover 5 chassis with encoders has two additional bundles of wires, each containing the leads for the quadrature encoder’s 5 V power (red), ground (black), and signal (white and yellow) connections; the wires are individually terminated with female connectors that mate with 0.1" (2.54 mm) male headers. Our Pololu AVR Library provides wheel encoder functions that make it easy to use these encoders for position feedback on an Orangutan, and the Orangutan SVP (pictured above) has dedicated inputs for dual quadrature encoders and an auxiliary MCU preprogrammed to process encoder signals.
Here is a simple C program for the Orangutan robot controllers that gets your Rover 5 chassis moving:
// Orangutan Rover 5 Demo Program
#include <avr/io.h> // provides ATmega-specific definitions/macros
#include <pololu/orangutan.h> // provides Pololu AVR library routines (LCD, motors, etc.)
int main()
{
clear(); // clear the LCD, set cursor to the start of the first LCD line
print("Tracked"); // print to the top line of the LCD
lcd_goto_xy(0, 1); // go to the start of the second LCD line
print("Chassis"); // print to the bottom line of the LCD
while (!button_is_pressed(ALL_BUTTONS)) {} // wait until a user button is pressed
delay_ms(500); // wait for 0.5 s
while (1) // loop forever
{
set_motors(255, 255);
delay_ms(5000);
set_motors(255, -255);
delay_ms(5000);
set_motors(-255, 255);
delay_ms(5000);
set_motors(-255, -255);
delay_ms(5000);
}
return 0;
}
People often buy this product together with:
 |
Sharp/Socle GP2Y0A21YK0F Analog Distance Sensor 10-80cm |
 |
Pololu RP5/Rover 5 Expansion Plate RRC07A (Narrow) Solid Black |
 |
Pololu RP5/Rover 5 Expansion Plate RRC07B (Wide) Solid Black |
Related products































Home | Forum | Blog | Support | Ordering Information | Lists | Distributors | BIG Order Form | About | Contact
© 2001–2025 Pololu Corporation
